showExtrinsics
可视化外部照相机参数
句法
描述
showExtrinsics(呈现单个校准的相机或经校准的立体声对外部参数的3-d可视化。函数绘制相对于所述照相机的校正图案的3-d图。该cameraParams)cameraParams输入包含无论是cameraParameters,fisheyeParameters或stereoParameters对象,该对象的estimateCameraParameters要么estimateFisheyeParameters函数返回。
showExtrinsics(使用由指定的风格的相机外参数的可视化显示cameraParams,视图)视图输入。
例子
可视化单相机内外参数
创建一组校正图像。
图像= imageDatastore(完整文件(toolboxdir('视力')'visiondata',...'校准','摄像头'));imageFileNames = images.Files(1:5);
检测校准图案。
[imagePoints,boardSize] = detectCheckerboardPoints(imageFileNames);
产生正方形的四角的世界坐标。方形尺寸为毫米。
squareSide = 25;worldPoints = generateCheckerboardPoints(boardSize,squareSide);
校准相机。
I = readimage(图像,1);IMAGESIZE = [大小(I,1),大小(I,2)];cameraParams = estimateCameraParameters(imagePoints,worldPoints,...'图片尺寸',图片尺寸);
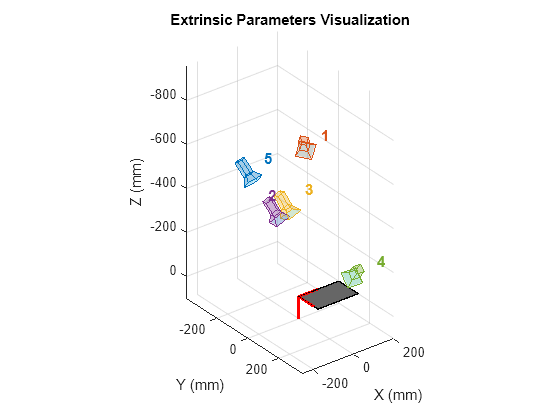
可视化模式的地点。
图showExtrinsics(cameraParams);

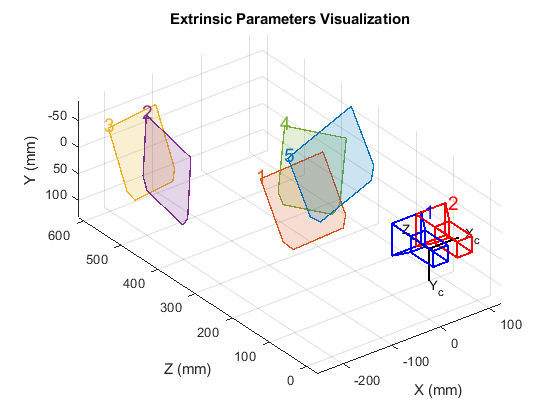
可视化拍照地点。
图showExtrinsics(cameraParams,'patternCentric');
相机外部参数可视化立体像对
指定校正图像。
IMAGEDIR =完整文件(toolboxdir('视力')'visiondata',...'校准','立体声');leftImages = imageDatastore(完整文件(IMAGEDIR,'剩下'));rightImages = imageDatastore(完整文件(IMAGEDIR,'对'));
检测棋盘。
[imagePoints,boardSize] = detectCheckerboardPoints(...leftImages.Files,rightImages.Files);
指定棋盘关键点的世界坐标。广场的大小是毫米。
squareSize = 108;worldPoints = generateCheckerboardPoints(boardSize,squareSize);
校准立体摄像系统。这两款相机具有相同的分辨率。
I = readimage(leftImages,1);IMAGESIZE = [大小(I,1),大小(I,2)];cameraParams = estimateCameraParameters(imagePoints,worldPoints,...'图片尺寸',图片尺寸);
可视化模式的地点。
数字;showExtrinsics(cameraParams);
可视化拍照地点。
数字;showExtrinsics(cameraParams,'patternCentric');

输入参数
输出参数
也可以看看
相机校准|立体相机校准|cameraParameters|detectCheckerboardPoints|estimateCameraParameters|fisheyeParameters|generateCheckerboardPoints|plotCamera|showReprojectionErrors|stereoParameters|undistortImage
主题
介绍了在R2014a
您还可以选择从下面的列表中的网站:
