detectCheckerboardPoints
检测图像中的棋盘格图案
句法
说明
[检测二维真彩色或灰度图像中大小大于4×4正方形的黑白棋盘。函数返回检测到的棋盘格点和尺寸。imagePoints,boardSize]=检测点(一世)
[检测作为文件名数组提供的一组输入图像中的棋盘格图案。imagePoints,boardSize,图像使用]=检测点(imageFileNames)
[检测一组输入图像中的棋盘格图案,该图像作为灰度或真彩色图像的数组提供。imagePoints,boardSize,图像使用]=检测点(图片)
[检测立体图像对,作为文件名的单元阵列提供的棋盘图案。imagePoints,boardSize,成对]=检测点(imageFileNames1,imageFileNames2)
[检测立体图像对中的棋盘格图案,以灰度或真彩色图像阵列的形式提供。imagePoints,boardSize,成对]=检测点(图像1,图像2)
[设置角度量阈值,指定为非负标量。当图像有噪声或高纹理时,增加该值可减少虚假角点的数量。imagePoints,boardSize,成对]=检测点(___, 'MinCornerMetric',0.15)
实例
在一组图像文件中检测棋盘格
创建校准图像的文件名的单元阵列。
对于I = 1:5映像文件名称=的sprintf('图像%d.tif', 一世);imageFileNames {I} =完整文件(matlabroot,'工具箱','视力',...'visiondata','校准','网络摄像头',图像文件名);结束
检测图像中的校准图案。
[imagePoints,boardSize,imagesUsed]=检测点(ImageFileName);
显示检测到的点。
imageFileNames = imageFileNames(imagesUsed);对于i=1:numel(imageFileNames)i=imread(imageFileNames{i});子块(2,2,i);imshow(i);保持在;情节(imagePoints(:,1,i)中,imagePoints(:,2,i)中,'RO');结束

检测棋盘立体图像中的
阅读立体图像。
numImages = 4;images1 =细胞(1,numImages);images2 =细胞(1,numImages);对于I = 1:numImages images1 {I} =完整文件(matlabroot,'工具箱','视力',...'visiondata','校准','立体声','左',短跑('左边%02d.png',i));图像2{i}=fullfile(matlabroot,'工具箱','视力',...'visiondata','校准','立体声','对',短跑('右侧%02d.png',一世));结束
检测图像中的棋盘格。
[图像点、板大小、成对使用]=...检测卡氏点(图像1、图像2);
从images1显示点。
images1 = images1(pairsUsed);数字;对于I = 1:numel(images1)I = imread(images1 {I});副区(2,2,i)的;imshow(I);保持在;情节(imagePoints(:,1,I,1),imagePoints(:,2,I,1),'RO');结束注解('文本框',[0 0.9 1 0.1],'串',“摄像机1”,...'EdgeColor','没有','水平对齐','中央')

从images2显示点。
images2 = images2(pairsUsed);数字;对于i=1:numel(images2)i=imread(images2{i});子块(2,2,i);imshow(i);保持在;情节(imagePoints(:,1,I,2),imagePoints(:,2,I,2),'RO');结束注解('文本框',[0 0.9 1 0.1],'串',“摄像头2”,...'EdgeColor','没有','水平对齐','中央')

输入参数
输出参数
imagePoints- 检测棋盘角坐标
中号-by-2矩阵|中号-by-2逐图像数阵列|中号-by-2逐图像对数-由-摄像机数量阵列
检测棋盘角坐标,返回一个中号-一个图像的by-2矩阵。对于多个图像,点作为中号-by-2逐图像数数组,对于立体图像对,函数返回点作为中号-by-2逐对的数量-由-摄像机数量阵列。
对于立体声对,imagePoints(:,:,:,1)是从所述第一组图像的点,并imagePoints(:,:,:,2)是从第二组的图像的点。输出包含中号[数Xÿ]坐标。每个坐标表示在棋盘上检测到直角的点。函数返回的点数取决于boardSize,表示检测到的方块数。该函数以亚像素精度检测点。
该函数计算点的数量,中号,如下所示:
中号=产品(boardSize-1) 是的。 |
如果无法检测到棋盘格:
imagePoints=[] |
boardSize=[0,0] |
当您指定imageFileNames输入,函数可以返回imagePoints作为中号-by-2逐ñ阵列。在此阵列中ñ表示在其中检测到棋盘的图像的数量。
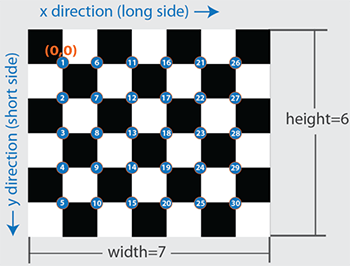
boardSize- 棋盘尺寸
2元素[高度,宽度]矢量
棋盘尺寸,返回作为2元件[高度,宽度]矢量。棋盘的尺寸是用正方形的数量来表示的。
图像使用-模式检测标志
ñ-by-1逻辑向量
模式检测标志,返回一个ñ-by-1逻辑向量ñ逻辑值。因为有输入图像的函数输出相同数量的逻辑值的。一个真的值指示已在相应图像中检测到该图案。一个假值表示函数未检测到模式。
成对-立体对模式检测标志
ñ-by-1逻辑向量
立体声对图案检测标志,返回作为ñ-by-1逻辑向量ñ逻辑值。因为有输入图像的函数输出相同数量的逻辑值的。一个真的值表示在相应的立体图像对中检测到该图案。一个假值表示该函数不检测的图案。
工具书类
[1]盖革,A.,F. Moosmann,O.汽车,和B.舒斯特。“自动摄像机和范围传感器校准使用单发射击,”国际会议机器人与自动化(ICRA),圣保罗,美国,2012年5月。
扩展功能
在R2014a中引入
也可以从以下列表中选择网站:
