estimateCameraParameters
校准单个或立体摄像机
句法
描述
[回报cameraParams,imagesUsed,estimationErrors] = estimateCameraParameters(imagePoints,worldPoints)cameraParams, 一个cameraParameters对象包含用于内部和外部参数和单个照相机的失真系数的估计。该功能也将返回用于估计相机参数和标准估计误差为单摄像机标定图像。
[回报stereoParams,pairsUsed,estimationErrors] = estimateCameraParameters(imagePoints,worldPoints)stereoParams, 一个stereoParameters对象包含立体相机的参数。该功能也将返回用于估计立体声参数和标准估计误差为立体摄像机标定图像。
cameraParams= estimateCameraParameters(___,名称,值)cameraParams由一个或多个指定的对象的属性名称,值配对参数,使用任何前述语法。未指定的属性都有其默认值。
例子
单相机校准
创建一组校正图像。
图像= imageSet(完整文件(toolboxdir('视力')'visiondata',...'校准','单核细胞增多症'));imageFileNames = images.ImageLocation;
检测校准模式。
[imagePoints,boardSize] = detectCheckerboardPoints(imageFileNames);
产生正方形的四角的世界坐标。
squareSizeInMM = 29;worldPoints = generateCheckerboardPoints(boardSize,squareSizeInMM);
校准相机。
I = readimage(图像,1);IMAGESIZE = [大小(I,1),大小(I,2)];PARAMS = estimateCameraParameters(imagePoints,worldPoints,...'图片尺寸',图片尺寸);
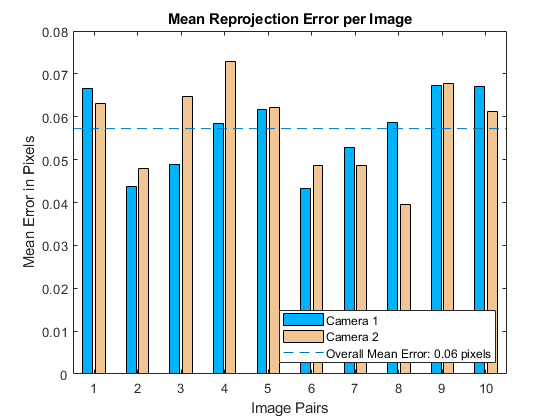
可视化的校准精度。
showReprojectionErrors(PARAMS);

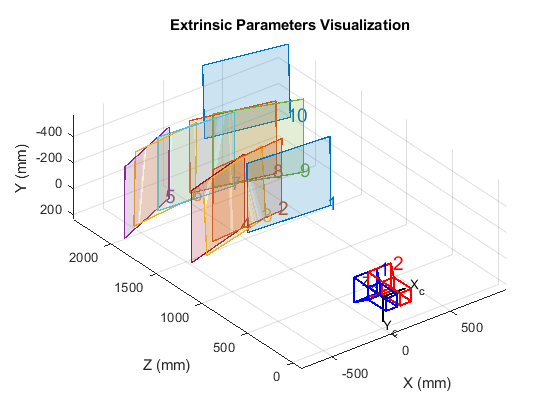
可视化相机外部参数。
数字;showExtrinsics(PARAMS);

的DrawNow;
情节检测和重新投影点。
数字;imshow(imageFileNames {1});保持上;图(imagePoints(:,1,1),imagePoints(:,2,1),'走');图(params.ReprojectedPoints(:,1,1),params.ReprojectedPoints(:,2,1),'R +');传说(“检测点”,'ReprojectedPoints');保持离;

立体相机校准
指定校正图像。
leftImages = imageDatastore(完整文件(toolboxdir('视力')'visiondata',...'校准','立体声','剩下'));rightImages = imageDatastore(完整文件(toolboxdir('视力')'visiondata',...'校准','立体声','对'));
检测棋盘。
[imagePoints,boardSize] =...detectCheckerboardPoints(leftImages.Files,rightImages.Files);
指定棋盘的关键点的世界坐标。广场的大小是毫米。
squareSize = 108;worldPoints = generateCheckerboardPoints(boardSize,squareSize);
校准立体摄像系统。这两款相机具有相同的分辨率。
I = readimage(leftImages,1);IMAGESIZE = [大小(I,1),大小(I,2)];PARAMS = estimateCameraParameters(imagePoints,worldPoints,...'图片尺寸',图片尺寸);
可视化的校准精度。
showReprojectionErrors(PARAMS);
可视化相机外部参数。
数字;showExtrinsics(PARAMS);
输入参数
imagePoints-校准模式的关键点
中号-by-2逐numImages|中号-by-2逐numPairs-by-2阵列
校准图案的关键点,指定为阵列[X,ÿ]固有的图像坐标。
| 校准 | [输入阵列X,ÿ] 关键点 |
|---|---|
| 单摄像头 | 中号-by-2逐numImages[阵列X,ÿ]点。
|
| 立体相机 | 中号-by-2逐numPairs-by-2的阵列[X,ÿ]点。
|
数据类型:单|双
worldPoints-在世界坐标系的校准模式的关键点
中号-by-2阵列
在世界坐标系的校准模式的关键点,指定为中号-by-2的阵列中号[数X,ÿ]世界坐标。该模式必须是平面的;因此,ž坐标 - 是零。
数据类型:单|双
名称 - 值对参数
指定可选的用逗号分隔的对名称,值参数。名称是参数的名称和值是对应的值。名称必须出现引号内。您可以按照任何顺序指定多个名称和值对参数名1,值1,...,NameN,值N。
'WorldUnits',“毫米”集世界点单位毫米。
'WorldUnits'-世界点为单位
“毫米”(默认)|特征向量|串标
世界点为单位,指定为逗号分隔的一对组成的'WorldUnits'和字符向量或标量的字符串。
'EstimateSkew'-估计歪斜
假(默认)|逻辑标
估计偏斜,指定为逗号分隔的一对组成的'EstimateSkew'和一个逻辑标量。当您将此属性设置为真正中,函数估计图像轴歪斜。当设置为假中,图像轴线精确地垂直和功能将歪斜到零。
'NumRadialDistortionCoefficients'-径向失真系数的数目
2(默认)|3
径向失真系数的数目来估计,指定为逗号分隔的一对组成的'NumRadialDistortionCoefficients'和值2要么3。当光线弯曲更靠近比他们在其光学中心做透镜的边缘发生径向扭曲。该透镜越小,失真越大。
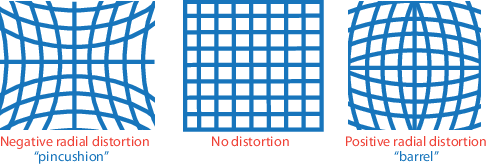
径向失真模型的系数这种类型的失真。所述失真点被表示为(X扭曲,ÿ扭曲):
X扭曲=X(1 +ķ1*[R2+ķ2*[R4+ķ3*[R6)
ÿ扭曲=ÿ(1 +ķ1*[R2+ķ2*[R4+ķ3*[R6)
X,ÿ- 无失真的像素位置。X和ÿ在标准化的图像坐标。标准化图像坐标是从像素坐标通过平移的光学中心和以像素为单位由焦距除以计算。从而,X和ÿ是无量纲的。
ķ1,ķ2和ķ3- 镜片的径向失真系数。
[R2:X2+ÿ2
典型地,两个系数足以用于校准。对于严重的失真,例如在广角镜头,可以选择3个系数为包括ķ3。
'EstimateTangentialDistortion'-切向失真标志
假(默认)|逻辑标
切向畸变标志,指定为逗号分隔的一对组成的,'EstimateTangentialDistortion'和一个逻辑标量。当您将此属性设置为真正,函数估计的切向变形。当你将它设置为假,切向变形可以忽略不计。
当透镜和图像平面不平行发生切向畸变。切向畸变系数模拟这种类型的失真。

所述失真点被表示为(X扭曲,ÿ扭曲):
X扭曲=X+ [2 *p1*X*ÿ+p2*([R2+ 2 *X2)]
ÿ扭曲=ÿ+ [p1*([R2+ 2 *ÿ2)+ 2 *p2*X*ÿ]
X,ÿ- 无失真的像素位置。X和ÿ在标准化的图像坐标。标准化图像坐标是从像素坐标通过平移的光学中心和以像素为单位由焦距除以计算。从而,X和ÿ是无量纲的。
p1和p2- 镜片的切向畸变系数。
[R2:X2+ÿ2
输出参数
算法
参考
[1]张,Z.“灵活的新技术的摄像机标定”。IEEE交易模式分析与机器智能.Vol。22,第11期,2000,第1330至1334年。
[2] Heikkila,J,和O. Silven。“四步相机校准步骤与隐图象校正”,IEEE国际计算机视觉与模式识别,1997年。
[3] Bouguet,J.Y.“相机校准MATLAB工具箱”,计算机视觉技术处的加州理工学院。摄像机标定MATLAB工具箱。
[4] Bradski,G。,和A. Kaehler。学习OpenCV的:计算机视觉与OpenCV库。塞瓦斯托波尔,CA:奥赖利,2008年。
也可以看看
应用
类
功能
介绍了在R2014b
您还可以选择从下面的列表中的网站:
