主要内容
重建科学
从差异图中重建3-D场景
描述
XYZPOINTS.= ReconstrugeScene(disparitymap.那斯特奥奥托姆)斯特奥奥托姆输入必须与用于纠正与视差图对应的立体图像相同的输入。
例子
从差异图中重建3-D场景
加载立体声参数。
加载('webcamsscenereconstruction.mat');
阅读立体声对图像。
i1 = imread('scenereconstrigchtleft.jpg');i2 = imread('scenereconstructionsright.jpg');
纠正图像。
[J1,J2] = rectifyStereoImages(I1,I2,Stereoparams);
整流后显示图像。
图IMSHOW(CAT(3,J1(::,1),J2(::,2:3)),'InitialMagnification',50);

计算差异。
dissaritymap = disparitysgm(im2gray(j1),im2gray(j2));图imshow(disparitymap,[0,64],'InitialMagnification',50);
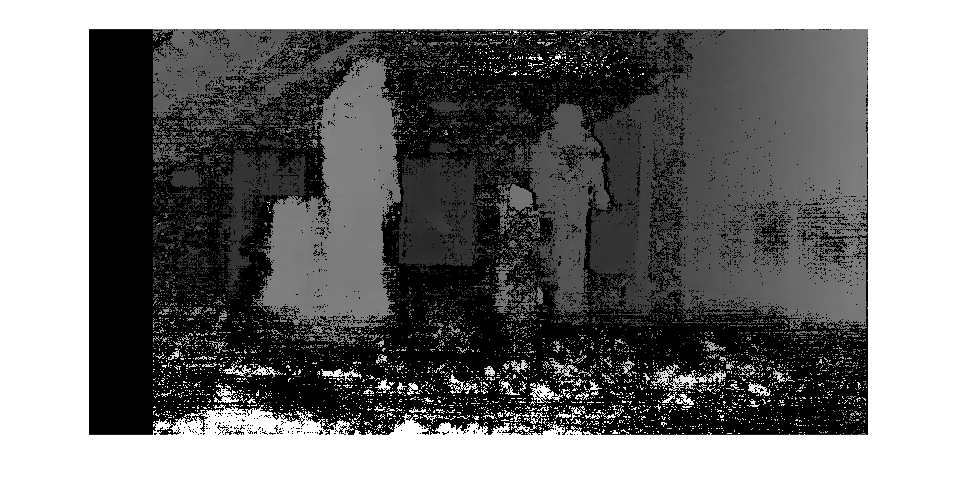
重建与视差图的每个像素对应的点的三维世界坐标。
XYZPOINTS = ReconstructScene(DisparityMap,Stereoparams);
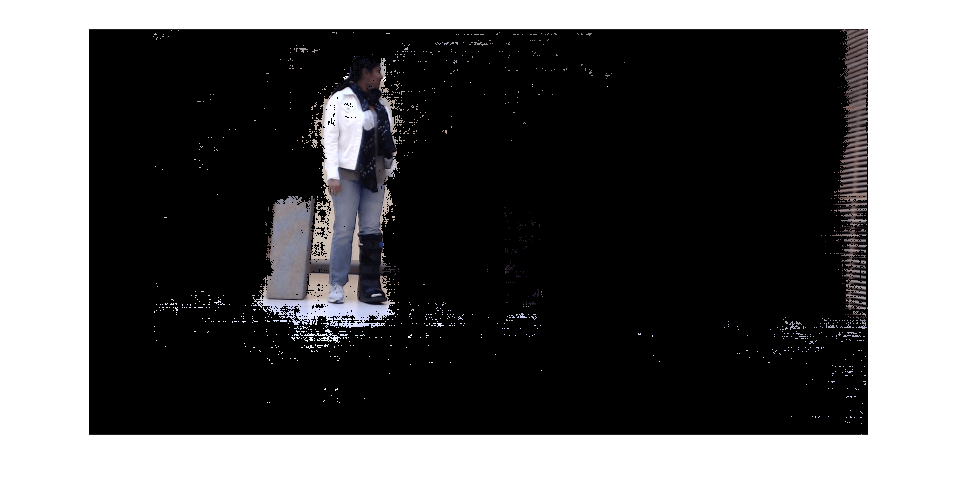
将一个人距离距离相机3.2和3.7米之间。
Z = XYZPOINTS(::,3);面膜= Repmat(z> 3200&z <3700,[1,1,3]);J1(〜掩码)= 0;imshow(J1,'InitialMagnification',50);
输入参数
输出参数
参考
[1] G. Bradski和A. Kaehler,学习OpenCV:与OpenCV库的计算机愿景,塞巴斯托波尔,加利福尼亚州:O'Reilly,2008。
扩展能力
也可以看看
职能
对象
在R2014A介绍
您还可以从以下列表中选择一个网站:
