rectifyStereoImages
纠正一对立体声图像
语法
描述
[的回报无失真和纠正版本J1.那J2.] = rectifyStereoImages(I1那I2那斯特奥奥托姆)I1和I2使用立体声参数输入图像存储在斯特奥奥托姆对象。
立体图像校正投影图像到公共图像平面以这样的方式使相应的点具有相同的行坐标。该图像投影,使图像看起来好像两个摄像头是平行的。用来disparitybm.或者disparitysgm.函数从纠正的图像计算视差图,用于3-D场景重建。
例子
整顿的立体图像
指定包含校准棋盘的图像。
IMAGEDIR =完整文件(toolboxdir('愿景'),'VisionData'那......'校准'那“立体声”);leffimages = imagedataStore(fullfile(imagedir,“左”));Rightimages = imageageAtastore(fullfile(imagedir,“正确的”));
检测棋盘。
[imagePoints,boardsize] =侦探校验erboards(......leffimages.files,trainimages.files);
指定Checkerboard Keypoints的世界坐标。
squareSizeInMillimeters = 108;worldPoints = generateCheckerboardPoints(boardSize,squareSizeInMillimeters);
阅读图像中。
I1 = ReadImage(左幅,1);I2 = ReadImage(RightImages,1);图像zize = [size(i1,1),大小(i1,2)];
校准立体摄像系统。
stereoParams = estimateCameraParameters(imagePoints,worldPoints,......'IMAGESIZE',图像化);
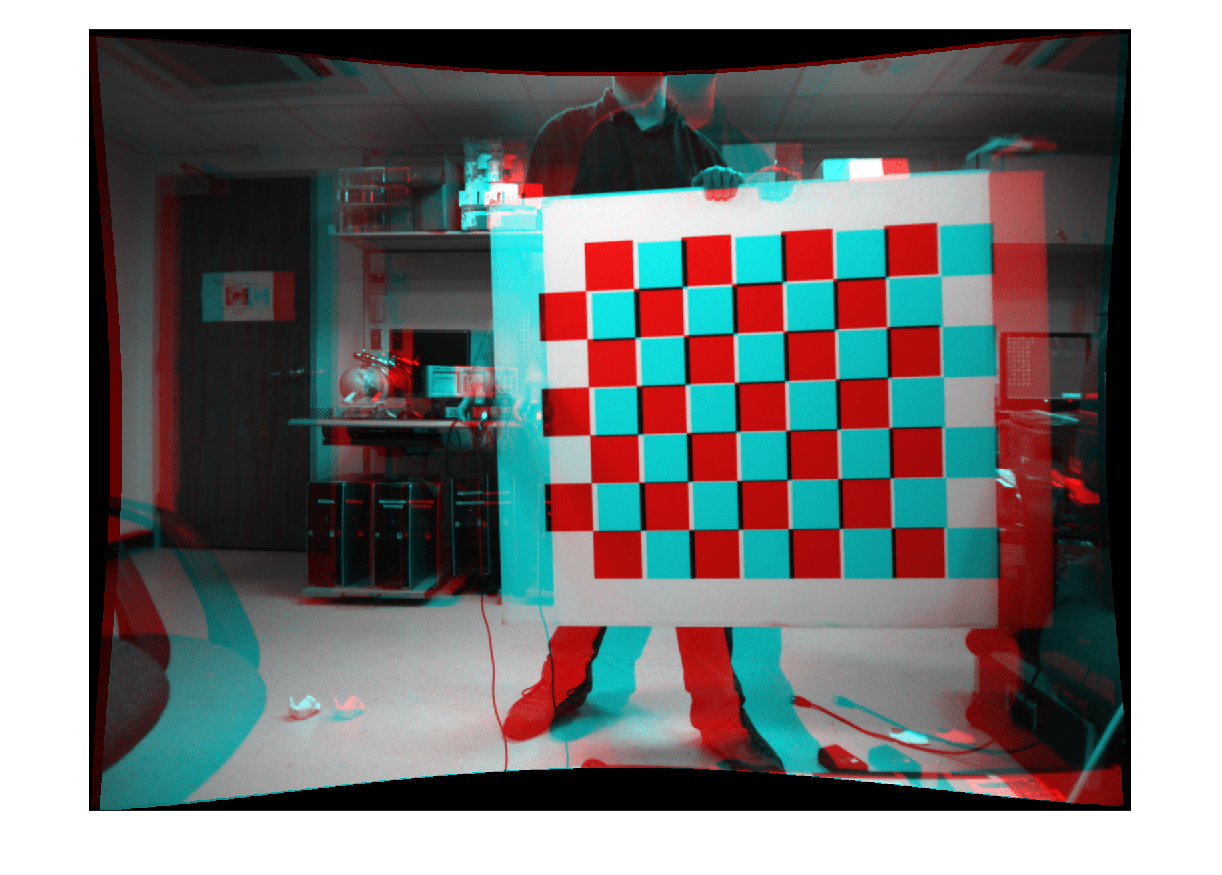
使用“完整”输出视图纠正图像。
[J1_full,J2_full] = rectifyStereoImages(I1,I2,stereoParams,......'OutputView'那“满”);
显示“完全”输出视图的结果。
图;imshow(立体式(j1_full,j2_full));
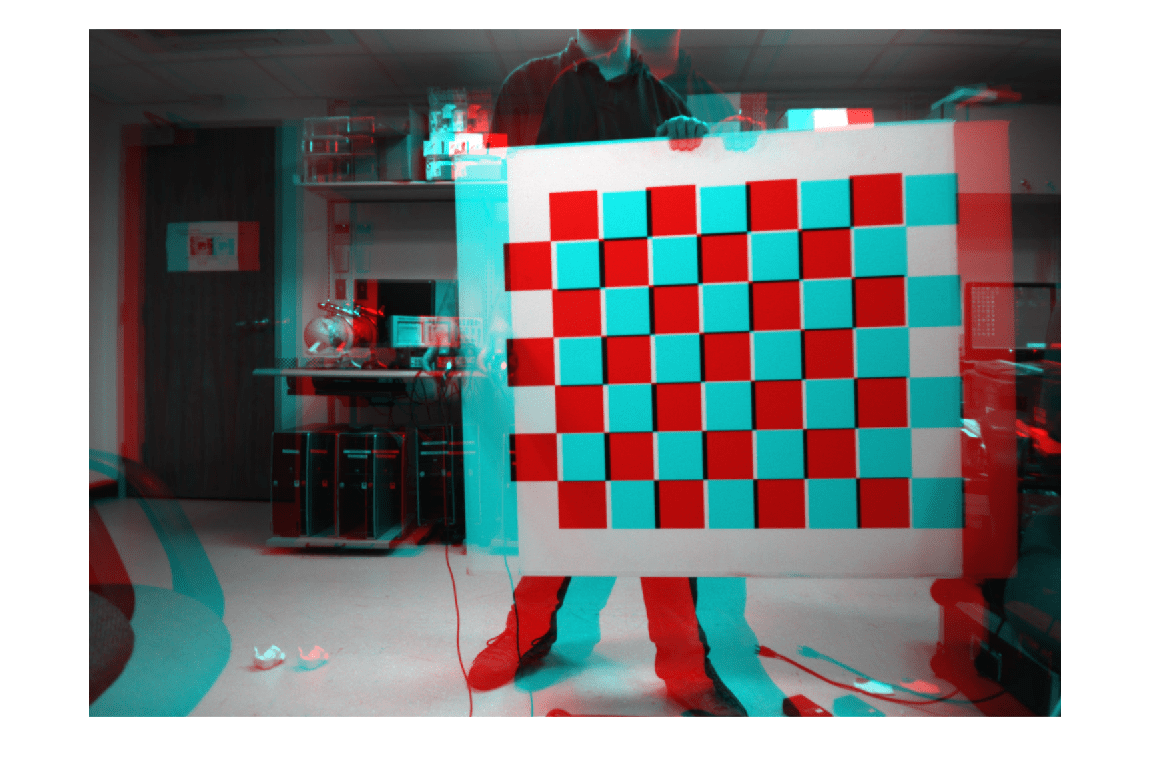
使用“有效”输出视图纠正图像。这最适合计算差异。
[J1_VALID,J2_VALID] = rectifyStereoImages(I1,I2,Stereoparams,......'OutputView'那“有效”);
显示“有效”输出视图的结果。
图;imshow(stereoAnaglyph(J1_valid,J2_valid));
输入参数
输出参数
参考资料
[1] G. Bradski和A. Kaehler,学习OpenCV:与OpenCV库的计算机愿景。塞巴斯托波尔,加利福尼亚州:O'Reilly,2008。
扩展能力
另请参阅
相机校准器|立体相机校准|disparitybm.|disparitysgm.|估计估计|estissuncalibratedrection.|reconstructScene|立体塔纳米仪
介绍了在R2014a
您还可以从以下列表中选择一个网站:
