文档帮助中心文档
摄像机标定是利用包含校准模式的图像估计摄像机参数的过程。参数包括相机固有参数、失真系数和相机外部参数。使用这些相机参数可以从图像中去除镜头失真效果,测量平面物体,从多个相机中重建3d场景,并执行其他计算机视觉应用程序。
使用相机校准器应用程序和功能估计单相机的内在,外在,和镜头失真参数。
使用立体相机校准器应用程序和功能,以估计参数和相对位置和方向的两个相机在一个立体相机对。然后你可以使用相机从图像中恢复深度。它还计算第二个摄像机相对于第一个摄像机的位置和方向。
全部展开
detectCheckerboardPoints
generateCheckerboardPoints
estimateCameraParameters
estimateCameraMatrix
estimateFisheyeParameters
estimateStereoBaseline
cameraParameters
cameraIntrinsics
cameraMatrix
fisheyeIntrinsics
fisheyeParameters
stereoParameters
cameraCalibrationErrors
intrinsicsEstimationErrors
extrinsicsEstimationErrors
stereoCalibrationErrors
fisheyeCalibrationErrors
fisheyeIntrinsicsEstimationErrors
undistortImage
undistortPoints
undistortFisheyeImage
undistortFisheyePoints
pcshow
plotCamera
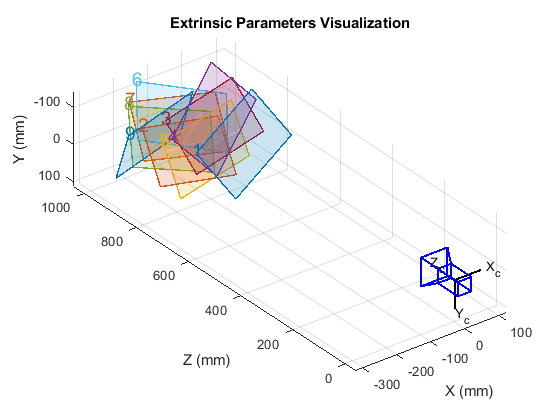
showExtrinsics
showReprojectionErrors
stereoAnaglyph
外在
extrinsicsToCameraPose
cameraPoseToExtrinsics
relativeCameraPose
rotationMatrixToVector
rotationVectorToMatrix
鱼眼校正基础知识
MATLAB中的鱼眼摄像机模型及标定
什么是相机校准?
估计图像或视频摄像机的镜头和图像传感器的参数。
坐标系统
指定像素索引、空间坐标和三维坐标系统
单摄像头校准应用
估计相机的内在,外在,和镜头畸变参数。
立体相机校准应用
校准立体相机,你可以用它来从图像中恢复深度。
点特征类型
为几种类型的特性选择返回和接受点对象的函数
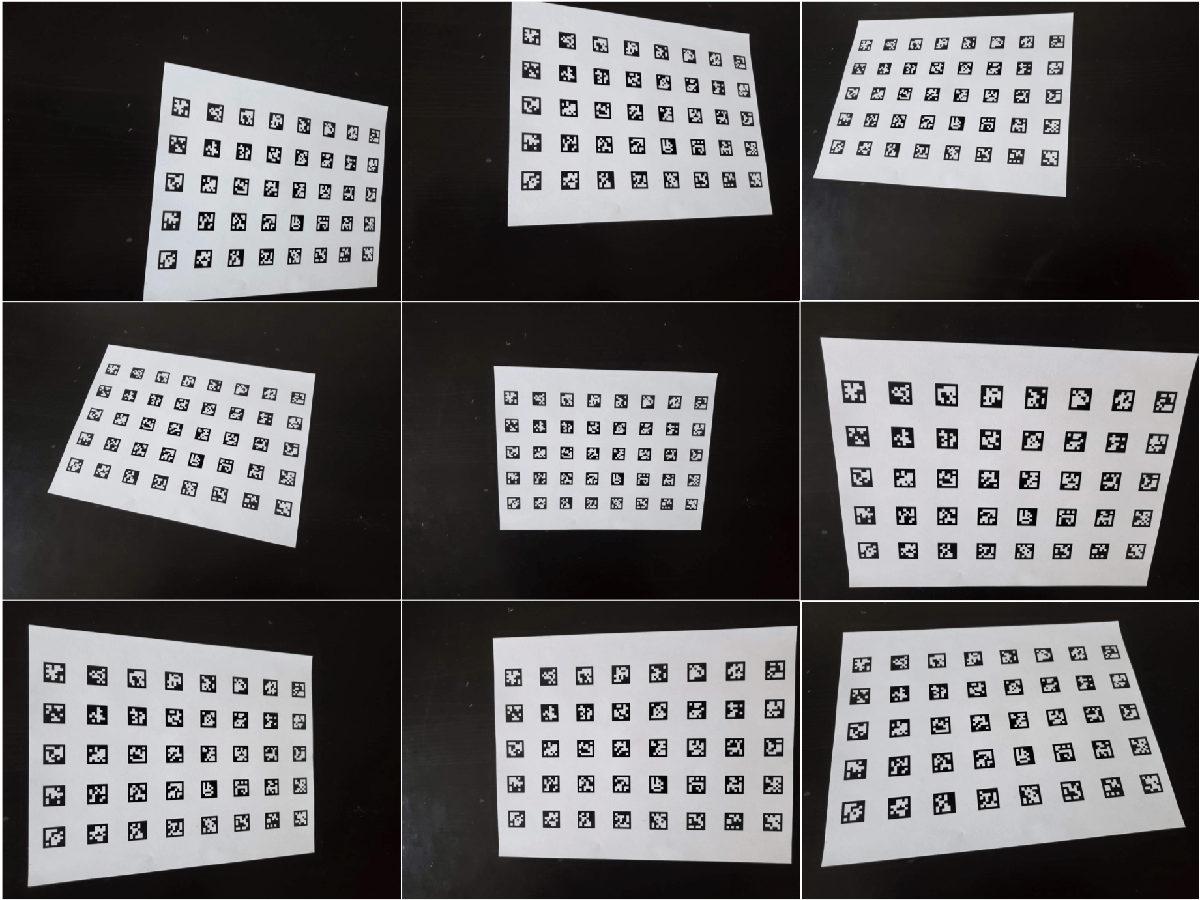
在校准模式中检测和定位AprilTags。
使用cameracalcalibrator应用程序或estimatecamerparameters函数评估相机参数估计的准确性。
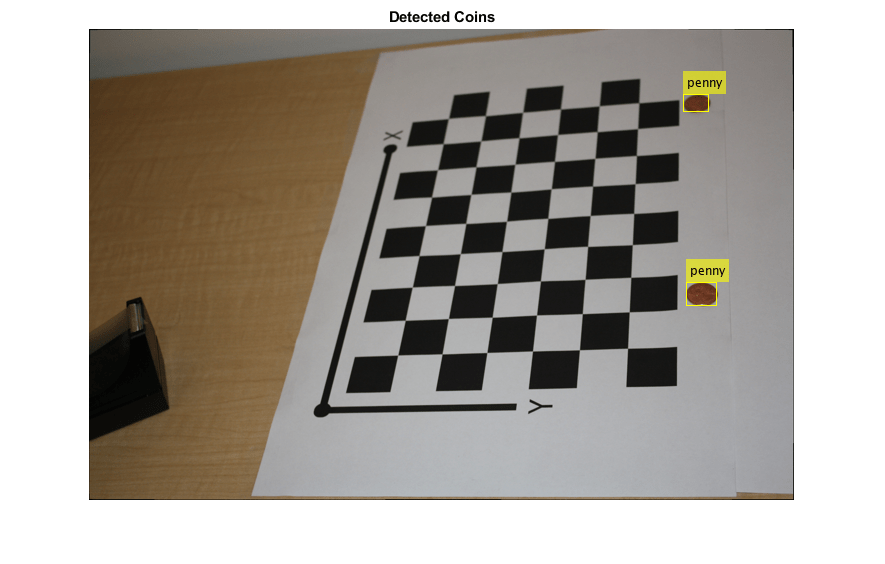
用一台校准过的相机测量硬币的直径。
将鱼眼摄像机模型转换为针孔模型。
你点击一个链接对应于这个MATLAB命令:
通过在MATLAB命令窗口中输入命令来运行命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:.
你也可以从以下列表中选择一个网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
与当地办事处联系