主要内容
undistortFisheyePoints
修正鱼眼镜头变形的点坐标
语法
描述
undistortedPoints= undistortFisheyePoints (点,intrinsic)
undistortedPoints= undistortFisheyePoints (___,scaleFactor)scaleFactor和前面的输入。
[___,还返回一个camIntrinsics) = undistortFisheyePoints (___)cameraIntrinsics对象,它对应于产生未扭曲点的虚拟透视相机。
[___,同样的回报reprojectionErrors) = undistortFisheyePoints (___)reprojectionErrors用于评价未变形点的精度。该函数通过对点施加失真,并取结果与相应输入点之间的距离来计算重投影误差。
例子
从鱼眼图像不扭曲棋盘点
校正图像中检测到的棋盘点进行校正和平移,然后显示结果。
创建一个imageDatastore对象包含棋盘校准图像。
图像= imageDatastore (fullfile (toolboxdir (“愿景”),“visiondata”,...“校准”,“还装有”));imageFileNames = images.Files;
从图像中检测校准模式。
[imagePoints, boardSize] = detectCheckerboardPoints (imageFileNames);
为棋盘方块的角落生成世界坐标。
squareSize = 29;%毫米worldPoints = generateCheckerboardPoints (boardSize squareSize);
根据图像和世界点估计鱼眼参数。从第一个图像得到图像大小。
I = readimage(图片,10);imageSize = [size(I,1) size(I,2)];params = estimateFisheyeParameters (imagePoints worldPoints图象尺寸);
在第一个图像中,检测棋盘点。
点= detectCheckerboardPoints(我);
不失真的点和图像。
[undistortedPoints, intrinsics1] = undistortFisheyePoints(点,params.Intrinsics);[J, intrinsics2] = undistortion fishheyeimage (I,params。intrinsic。“OutputView”,“全部”);
翻译未变形的点。
newOrigin = intrinsics2。PrincipalPoint - intrinsics1.PrincipalPoint;undistortion points = [undistortion points (:,1) + newOrigin(1),...undistortedPoints (:, 2) + newOrigin (2)];
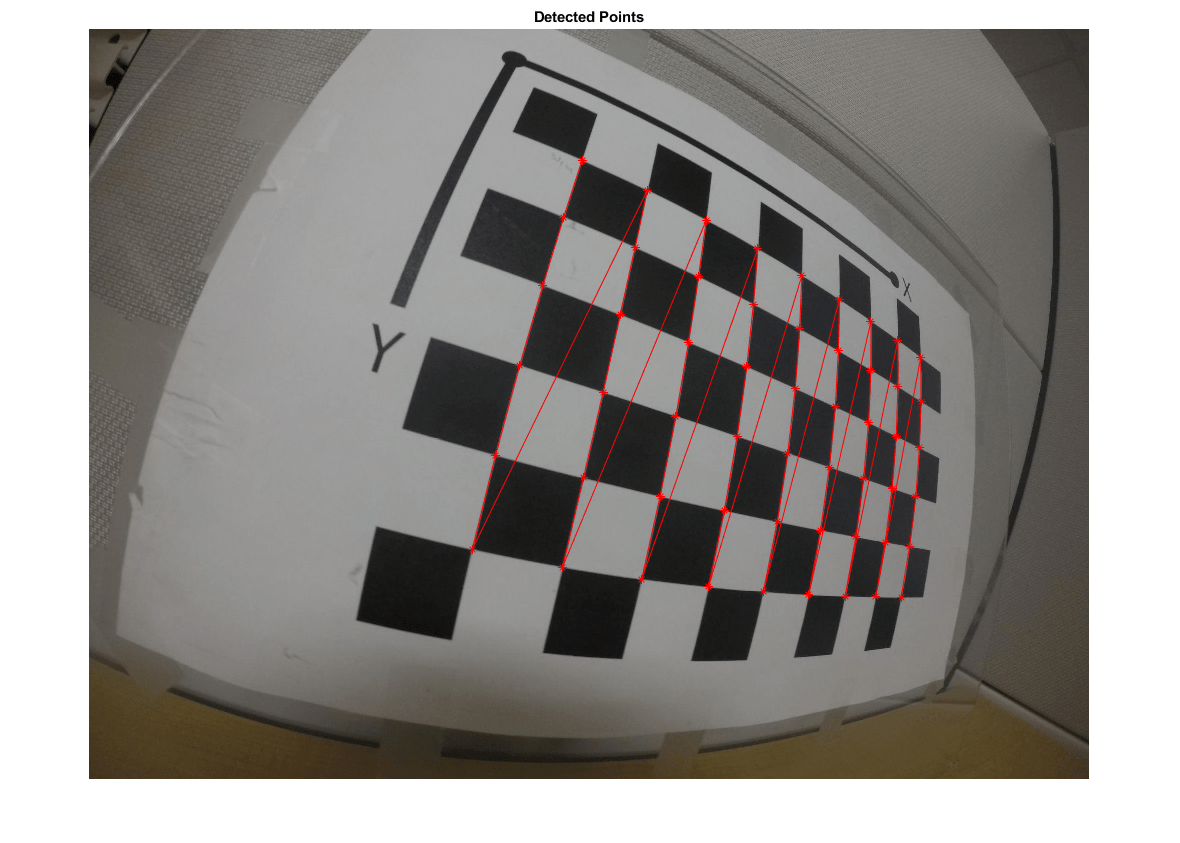
显示结果。
图imshow(我)在情节(点(:1),点(:,2),“r * - - - - - -”)标题(“发现点”)举行从
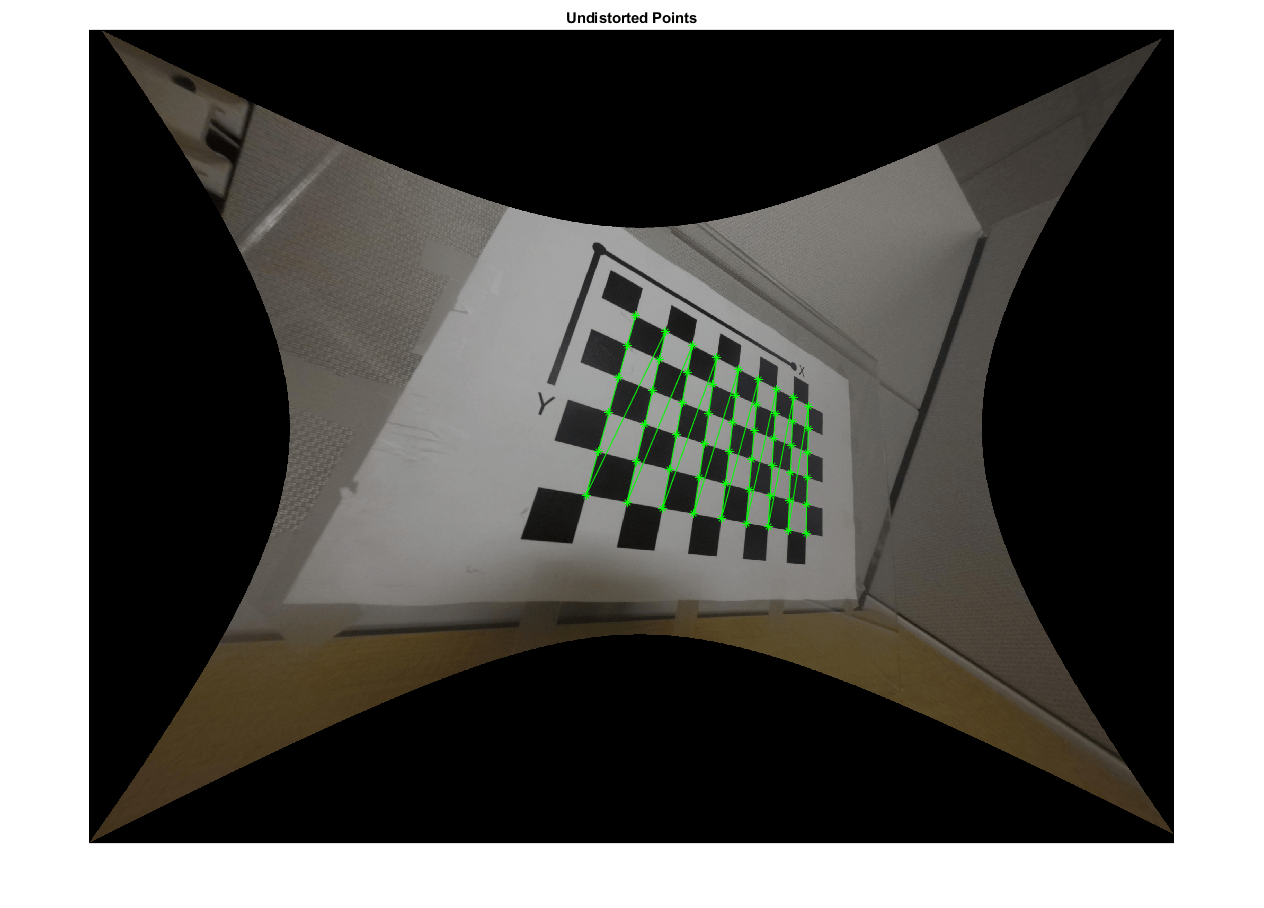
图imshow (J)在情节(undistortedPoints (: 1) undistortedPoints (:, 2),“g * - - - - - -”)标题(“不失真点”)举行从
输入参数
输出参数
介绍了R2017b
你也可以从以下列表中选择一个网站:
