主要内容
undostortimage.
校正镜头畸变的图像
句法
描述
例子
镜头失真的正确图像
创建一组校准图像。
images = imagedataStore(fullfile(toolboxdir('想象'),'VisionData'那......'校准'那'单核细胞增多症'));
检测校准模式。
[imagePoints,boardsize] =侦探校验erboardpoints(Images.files);
生成正方形角点的世界坐标。正方形的大小以毫米为单位。
Squaresize = 29;WorldPoints = GenerateCheckerboards(BoardSize,Squarize);
校准相机。
i = ReadImage(图像,1);图像zize = [size(i,1),size(i,2)];Cameraparams =估计估计(象育点,WorldPoints)......“图像大小”,图片尺寸);
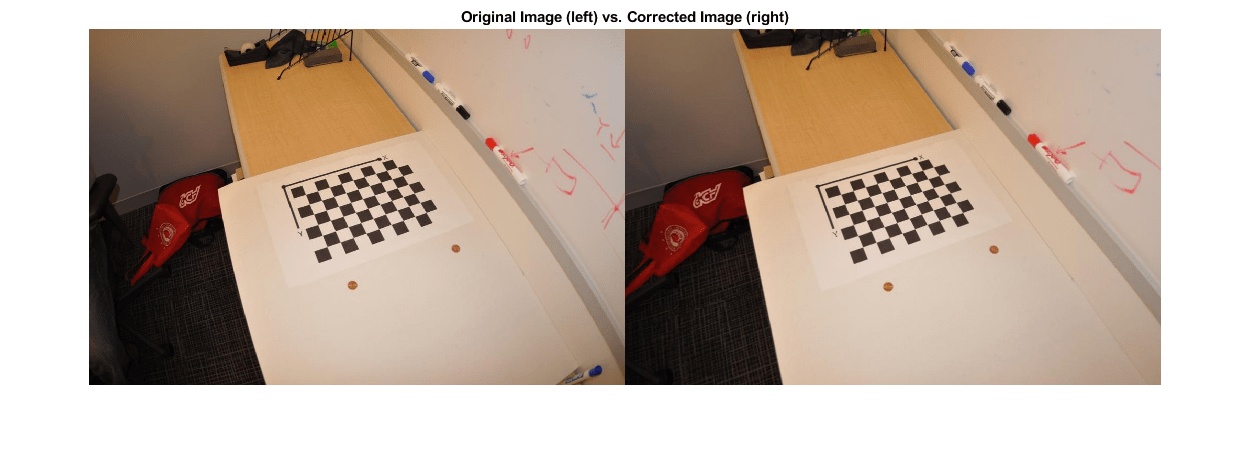
删除镜头失真和显示结果。
i = images.readimage(1);J1 = undostortimage(i,cameraparams);
图形imshowpair(I,J1,'剪辑');头衔('原始图像(左)与校正图像(右)');
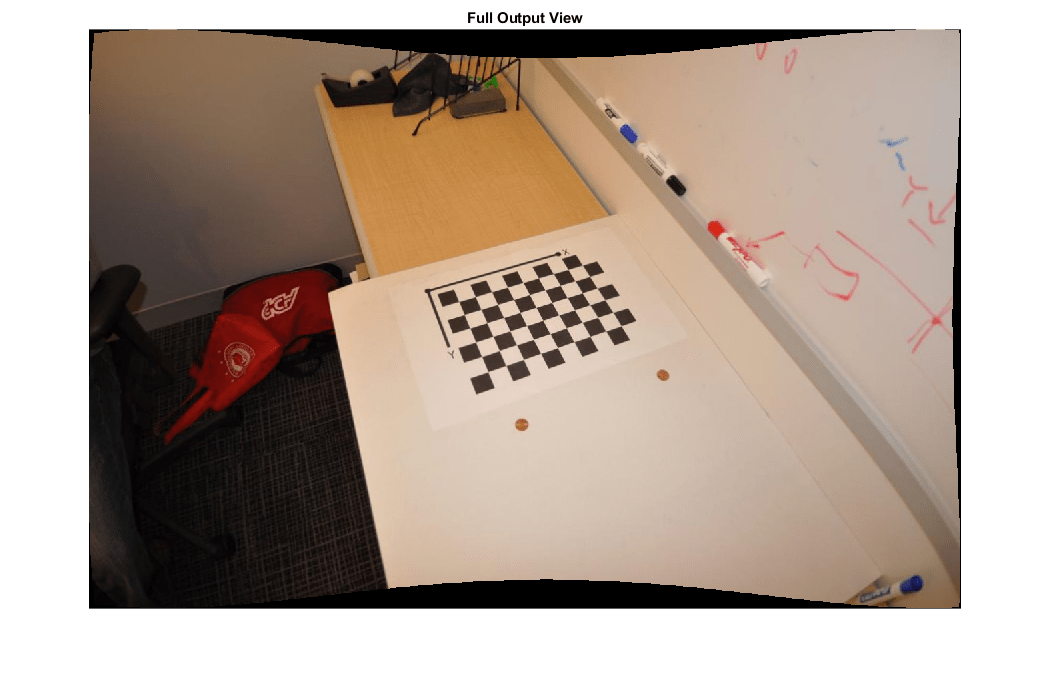
J2=未失真图像(I,摄像机参数,'OutputView'那“满”);数字;imshow(J2);标题('完全输出视图');
输入参数
一世-输入映像
m-借-N-by-3真彩色图像|m-借-N2-D灰度图像
输入图像,在m-借-N-by-3 TrueColor或m-借-N二维灰度。输入图像必须是真实的、非解析的。
数据类型:单身的|双倍的|int16|uint8.|uint16|逻辑
Cameraparams.-用于存储相机参数的对象
Cameraparameters.目的|cameraIntrinsics目的
摄影机参数,指定为Cameraparameters.或cameraIntrinsics目的。你可以返回Cameraparameters.对象使用估计估计功能。这Cameraparameters.对象包含相机的内在,外在和镜头失真参数。
interp.-插值方法
'线性'(默认)|“最近的”|“立方”
用于输入图像的插值方法,指定为'线性'那“最近的”, 或者“立方”。
名称值对参数
指定可选的逗号分离对名称,价值论据。姓名是参数名称和价值是对应的值。姓名必须出现在引号内。您可以以任何顺序指定多个名称和值对参数名称1,值1,…,名称,值。
'fillvalues'那0.设置将输出像素填充值设置为0.。
'fillvalues'-输出像素填充值
0.(默认)|标量子|三元向量
输出像素填充值,指定为逗号分隔对,由'填充'和一个包含一个或多个填充值的数组。当输入图像中相应的逆变换位置完全位于输入图像边界之外时,您将使用填充值作为输出像素。当您使用二维灰度输入图像时,必须设置填充标量。当您使用TrueColor时,填充可以是RGB值的标量或3元素向量。
'OutputView'-输出图像的大小
“一样”(默认)|“满”|“有效”
输出图像的大小,指定为逗号分隔的配对组成输出视图' 和“一样”那“满”, 或者“有效”。当您将属性设置为“一样”,该函数将输出图像设置为与输入图像的大小匹配。当您将属性设置为“满”,输出包括来自输入图像的所有像素。当您将属性设置为“有效”,该函数批量输出图像仅包含有效像素。
对于输入图像:

| 输出视图 | 输出图像 |
|---|---|
“一样” |
匹配输入图像的大小。
|
“满” |
输入图像中的所有像素。
|
“有效” |
仅来自输入图像的有效像素。
|



输出参数
扩展能力
R2014a中引入
您还可以从以下列表中选择网站:
