stereoParameters
用于存储立体声相机系统参数的对象
描述
这stereoParameters物体存储两个摄像机的内在和外在参数及其几何关系。
创建
你可以创建一个stereoParameters对象使用stereoParameters这里描述的功能。您也可以创建一个stereoParameters对象的estimateCameraParameters与m-by-2-by-numImages-by-2输入图像点数,在哪里m是每个模式中的关键点坐标的数量。
句法
描述
stereoParams = stereoParameters (创造一个cameraParameters1那cameraParameters2那Rotationofcamera2.那翻译CoMamera2.)stereoParameters对象,该对象包含立体摄像系统的参数,并设置Cameraparameters1.那Cameraparameters2.那Rotationofcamera2.,翻译CoMamera2.属性。
stereoParams = stereoParameters (创建一个相同的Paramstruct.)stereoParameters从现有的stereoParameters对象,其中存储了参数Paramstruct..
输入参数
特性
对象功能
诙谐 |
将立体参数对象转换为结构体 |
例子
立体声相机校准
指定图像校准。
leffimages = imagedataStore(fullfile(toolboxdir('想象'),'VisionData'那......'校准'那“立体”那“左”));rightImages = imageDatastore (fullfile (toolboxdir ('想象'),'VisionData'那......'校准'那“立体”那“对”));
检测棋盘。
[ImagePoints,BoardSize] =......detectcheckerboardpoints(leftimages.files,trigeimages.files);
指定Checkerboard Keypoints的世界坐标。方形尺寸为毫米。
Squaresize = 108;WorldPoints = GenerateCheckerboards(BoardSize,Squarize);
校准立体摄像系统。两款相机的分辨率相同。
I = readimage (leftImages, 1);图象尺寸=[(我,1),大小(我,2)];params = estimateCameraParameters (imagePoints worldPoints,......“图象尺寸”,图片大小);
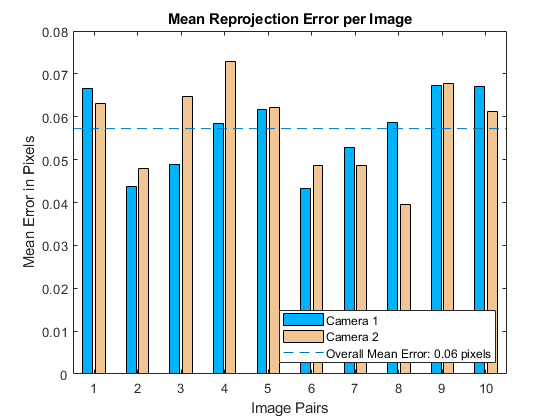
可视化校准精度。
showReprojectionErrors (params);
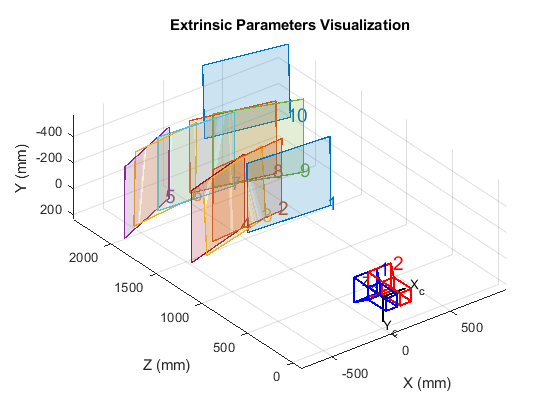
可视化相机外在内饰。
数字;showextrinsics(params);
参考文献
[1]张,Z.“相机校准灵活的新技术”。图案分析和机器智能的IEEE交易.vol。22,第11,2000,PP。1330-1334。
[2] Heikkila,J和O. Silven。“具有隐式图像校正的四步相机校准程序。”IEEE计算机愿景和模式识别国际会议.1997.
扩展能力
也可以看看
应用
班级
职能
你也可以从以下列表中选择一个网站:
