由三角形组成的
立体图像中未畸变匹配点的三维位置
语法
描述
世界观点=三角形(matchedPoints1那matchedPoints2那斯特奥奥托姆)
世界观点=三角形(matchedPoints1那matchedPoints2那Cameramatrix1.那Cameramatrix2.)
例子
测量从立体声相机到脸部的距离
负载立体声参数。
负载('webcamsscenereconstruction.mat');
阅读立体声对图像。
i1 = imread('scenereconstrigchtleft.jpg');i2 = imread('scenereconstructionsright.jpg');
Undistort图像。
I1 = untostortimage(i1,stereoparams.cameraparameters1);I2 = undostortimage(i2,stereoparams.cameraparameters2);
在两幅图像中检测一张脸。
FaceDetector = Vision.cascadeObjectDetector;Face1 = Facedetector(I1);Face2 = FaceDetector(I2);
找到脸的中心。
Center1 = face1(1:2) + face1(3:4)/2;Center2 = face2(1:2) + face2(3:4)/2;
计算从相机1到人脸的距离。
point3d =三角形(Center1,Center2,Stereoparams);Textinginmeters = Norm(Point3D)/ 1000;
显示检测到的人脸和距离。
distanceasstring = sprintf('%0.2F米', distanceInMeters);I1 = insertObjectAnnotation (I1,'矩形'face1 distanceAsString,'fontsize',18);I2 = InsertObjectAnnotation(I2,'矩形',面部2,distanceastring,'fontsize',18);i1 = insertshape(i1,'citntrectangle', face1);I2 = insertShape (I2,'citntrectangle',面部2);imshowpair(i1,i2,'蒙太奇');

输入参数
matchedPoints1-图像中的点坐标1
m-By-2矩阵|surfpoints.对象|MSERREGIONS对象|cornerPoints对象|Brikspoint.对象
图1中点的坐标,指定为m2的矩阵m[X.y坐标,或作为KAZEPoints那surfpoints.那MSERREGIONS那cornerPoints或者Brikspoint.对象。当matchedPoints1和matchedPoints2输入必须包含使用函数匹配的点,如matchfeatures.。
matchedPoints2-要点的坐标
m-By-2矩阵|surfpoints.对象|MSERREGIONS对象|cornerPoints对象|Brikspoint.对象
图2中点的坐标,指定为m2的矩阵m[X.y坐标,或作为KAZEPoints那surfpoints.那MSERREGIONS那cornerPoints或者Brikspoint.对象。当matchedPoints1和matchedPoints2输入必须包含使用函数匹配的点,如matchfeatures.。

Cameramatrix1.-投影矩阵
4-by-3矩阵
摄像机1的投影矩阵指定为4×3矩阵。矩阵将同质坐标中的3-D点映射到相机图像中的对应点。该输入描述了相机1在世界坐标系中的位置和方向。Cameramatrix1.必须是实数非稀疏数值矩阵。您可以使用Cameramatrix.功能。
摄像机矩阵传递给函数,定义世界坐标系。
Cameramatrix2.-投影矩阵
4×3投影矩阵
摄像机1的投影矩阵指定为4×3矩阵。矩阵将同质坐标中的3-D点映射到相机图像中的对应点。该输入描述了相机1在世界坐标系中的位置和方向。Cameramatrix1.必须是实数非稀疏数值矩阵。您可以使用Cameramatrix.功能。
摄像机矩阵传递给函数,定义世界坐标系。
输出参数
世界观点- 3-D匹配成对的未变形图像点的位置
m-By-3矩阵
3-D匹配成对的未变形图像点的位置,指定为一个m-By-3矩阵。矩阵包含m[X.那y那Z.两幅立体图像中未变形的图像点匹配对的位置。
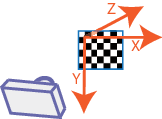
当你指定相机几何使用斯特奥奥托姆,世界点坐标相对于相机1的光学中心。
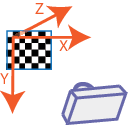
当你指定相机几何使用Cameramatrix1.和Cameramatrix2.,世界点坐标由相机矩阵定义。
函数返回世界观点as.双人间,如果matchedPoints1和matchedPoints2是双人间。否则函数返回世界观点as.单身。
数据类型:单身|双人间
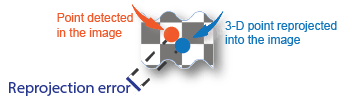
重新评论错误- 重新注明错误
m-By-1矢量
重新注明错误,作为一个返回m1的向量。该函数将每个世界点投影回两个图像中。然后在每个图像中,该函数计算重投影误差作为被检测点和重投影点之间的距离。当重新评论错误向量包含每个世界点的平均重投影误差。
提示
当由三角形组成的功能不考虑镜头失真。您可以使用该图像毫无替换图像undostortimage.在检测到点之前的功能。或者,您可以使用该点依赖于本点undostortpoints.功能。
参考文献
[1]哈特利,R.和A. Zisserman。“计算机愿景中的多视图几何形状。”剑桥大学出版社,p。312,2003。
扩展能力
另请参阅
相机校准器|立体相机校准器|Cameramatrix.|Cameraparameters.|估计估计|reconstructScene|relativeCameraPose|立体塔纳米仪|undostortimage.|undostortpoints.
介绍了R2014b
你也可以从以下列表中选择一个网站:
