估计
从世界到图像点对应关系估算相机投影矩阵
句法
描述
Cammatrix.= extimatecameramatrix(图像点那世界观点)
[还返回输注错误,这些错误量化投影图像坐标的准确性。Cammatrix.那重新评论错误] = evertatecameramatrix(图像点那世界观点)
例子
估计摄像机投影矩阵
将由RGB-D传感器捕获的3-D点云数据加载到工作区中。
ld = load('Object3d.mat');ptcloud = ld.ptcloud;
删除点INF.或者南从点云坐标。
[ValidptCloud,validIndices] = removeInvalidPoints(PTCloud);
阅读有效的世界点坐标。每个条目指定X那y那Z.点云中的点坐标。
WorldPoints = ValidptCloud.Location;
将相应的图像点坐标定义为点云数据的正交投影到yz.-飞机。
indices = 1:ptcloud.count;[y,z] = IND2SUB([大小(PTCloud.Location,1),尺寸(PTCloud.Location,2)],索引);imagePoints = [y(validindices)'z(validindices)'];
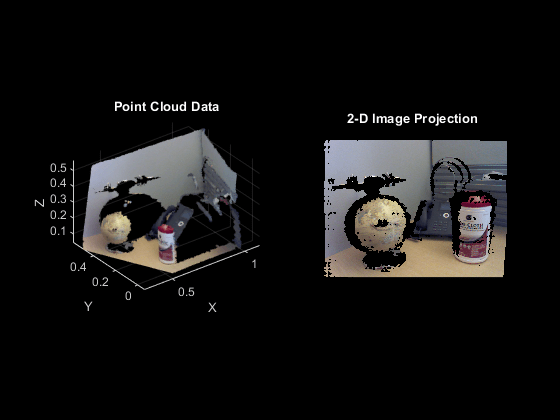
通过使用图像点坐标和它们的颜色值来生成二维图像投影。
projimage = zeros(max(maxpoints(:,1)),max(图像点(:,2)),3);RGB = VANDPTCLOUD.COLOR;为了j = 1:长度(RGB)projimage(图像点(j,1),映象点(j,2),:) = RGB(j,:);结尾
显示点云数据和相应的2-D图像投影。
图形子图(1,2,1)pcshow(ptcloud)xlabel('X');ylabel('是');Zlabel('Z');标题('点云数据'那'颜色',[1 1 1])子图(1,2,2)IMSHOW(UINT8(PROJIMIMAGE))标题('2-D图像投影'那'颜色',[1 1 1])
使用已知的世界点和图像点来估计相机投影矩阵和再分调误差。
[Cammatrix,RepoureErrors] =估计(观点,WorldPoints);
使用估计的摄像机投影矩阵作为输入findnearestneighbors.函数并找到查询点的最近邻居。
点= [0.4 0.3 0.2];%指定查询点k = 50;%指定要确定的最近邻居的数量[索引,dists] = findnearestneighbors(ptcloud,point,k,cammatrix);%获得最近邻居的索引和距离
使用选择获取最近邻居点云数据的功能。
ptcloudb = select(ptcloud,索引);
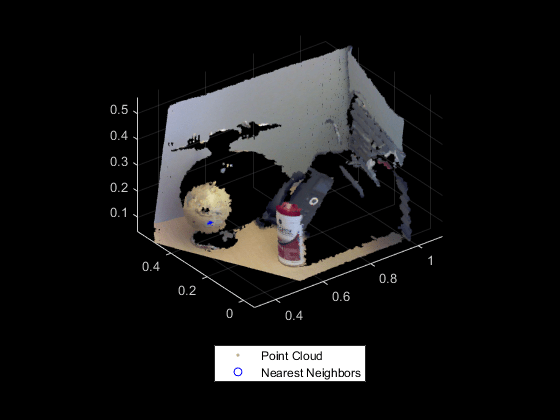
显示输入点云及其最近的邻居。
图,pcshow(ptcloud)持有上pcshow(ptcloudb.location,'ob') 抓住离开传奇('点云'那'最近的邻居'那'地点'那'southoutside'那'颜色',[1 1 1])
输入参数
输出参数
尖端
你可以使用估计估计相机投影矩阵的功能:
如果已知世界 - 图像点对应关系,并且相机内在和外在参数未知,则可以使用
Cameramatrix.功能。要计算3-D世界点的2-D图像点,请参阅“方程”
Cammatrix.。与之使用
findnearestneighbors.对象功能pointcloud.目的。使用相机投影矩阵的使用速度升高了RGB-D传感器生成的点云中的最近邻居搜索,例如Microsoft®kinect.®。
算法
鉴于世界要点X和图像点X,相机投影矩阵C,通过求解等式来获得
λ.X=CX。
使用直接线性变换(DLT)方法来解决方程[1]。该方法配制了均匀的方程线性系统,通过广义特征值分解获得溶液。
因为图像点坐标以像素值中给出,所以用于计算摄像机投影矩阵的方法对数值误差敏感。为避免数值误差,输入图像点坐标是归一化的,使其质心在原点处。此外,来自原点的图像点的根平均平方距离是 。这些步骤总结了估计相机投影矩阵的过程。
用变换归一化输入图像点坐标T.。
估计摄像机投影矩阵CN从归一化输入图像点。
计算非规范化的摄像机投影矩阵C作为CNT.-1。
计算恢复的图像点坐标XE.作为CX。
计算重新注明错误
重新评论错误= |X-XE.|。
参考
[1]理查德,H.和A. Zisserman。计算机视觉中的多视图几何。剑桥:剑桥大学出版社,2000年出版社。
也可以看看
应用
对象
职能
您还可以从以下列表中选择一个网站:
