主要内容
findNearestNeighbors
在点云中找到点最近的邻居
语法
描述
例子
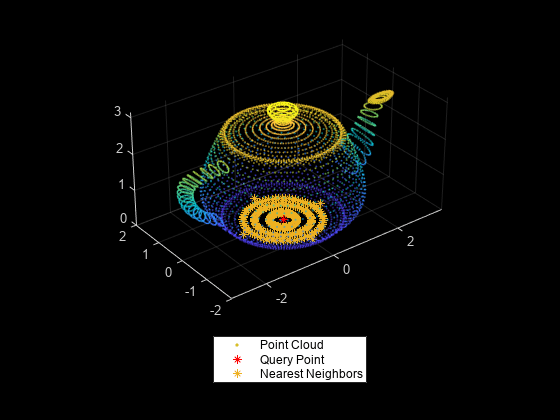
在点云中找到k近邻
将一组三维坐标点加载到工作区中。
装载(“xyzPoints.mat”);
创建点云对象。
ptCloud = pointCloud (xyzPoints);
指定要识别的查询点和最近邻居的数量。
点= (0,0,0);K = 220;
得到K个最近邻点的指数和距离。
[索引,距离]=FindNearestNeights(ptCloud,point,K);
显示点云。绘制查询点和它们最近的邻居。
图pcshow(云端)保持在图3(点(1)、点(2)、点(3),“*r”)图3(ptCloud.Location(索引1)、ptCloud.Location(索引2)、ptCloud.Location(索引3),‘*’)传奇(“点云”,“查询点”,“最近的邻居的,“位置”,“南外”,“颜色”,[1 1 1])保持从
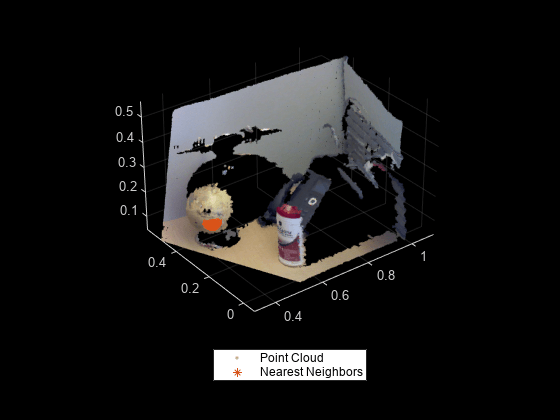
在有组织的点云中查找K近邻
使用摄像机投影矩阵在组织的点云数据中查找查询点的K近邻,从采样的点云数据点及其对应的图像点坐标计算摄像机投影矩阵。
将组织好的点云数据加载到工作区。点云是使用Kinect深度传感器生成的。
ld=负载(“object3d.mat”);ptCloud=ld.ptCloud;
指定采样点云数据的步长。
stepSize = 100;
对输入点云进行采样,并将采样的三维点坐标存储为点云对象。
索引=1:步长:ptCloud.Count;temptcloud=select(ptCloud,索引);
从采样点云中删除无效点。
[tempPtCloud, validIndices] = removeInvalidPoints (tempPtCloud);
定义输入点云的三维世界点坐标。
worldPoints=temptcloud.Location;
求输入点云的三维点坐标对应的二维图像坐标。
[Y、X] = ind2sub([大小(ptCloud.Location, 1),大小(ptCloud.Location, 2)),指数);imagePoints = [X(validIndices)' Y(validIndices)'];
根据图像和世界点坐标估计摄像机投影矩阵。
camMatrix=估计CameraMatrix(图像点、世界点);
指定要识别的查询点和最近邻居的数量。
Point = [0.4 0.3 0.2];K = 20;
利用摄像机投影矩阵求K个最近邻点的指标和距离。使用点云方法选择获取最近邻的点云数据。
[索引,距离]=FindNearestNeights(ptCloud,point,K,camMatrix);ptCloudB=选择(ptCloud,索引);
显示点云和查询点的最近邻居。
图pcshow(云端)保持在pcshow (ptCloudB。的位置,“ob”)传奇(“点云”,“最近的邻居的,“位置”,“南外”,“颜色”,[1 1 1])保持从
输入参数
输出参数
参考文献
[1] Muja,M.和David G.Lowe,“具有自动算法配置的快速近似近邻”。在VISAPP国际计算机视觉理论与应用会议上2009年,第331-340页。
扩展能力
介绍了R2015a
你也可以从以下列表中选择一个网站:
