pointCloud
存储3-D点云的对象
描述
创建
描述
输入参数
输出参数
特性
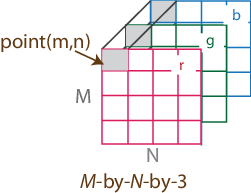
地点-点在三维坐标空间中的位置
m3组|m——- - - - - -N3组
此属性是只读的。
点在三维坐标空间中的位置,指定为m-By-3或m——- - - - - -N3数组。每个条目指定X那y,Z.3-D坐标空间中的一个点的坐标。您无法将此属性设置为名称值对。使用xyzPoints输入参数。
对于未经组织的点云,
地点必须指定为m-By-3阵列,在哪里m为点云中点的总数。对于有组织的点云,
地点必须指定为m——- - - - - -N3数组。三个频道代表X那y,Z.点的坐标。从投影相机获得的点,例如Kinect®或者激光雷达传感器,被存储为一个有组织的点云。
数据类型:单身的|双倍的
颜色-点云的颜色
[](默认)|m3组|m——- - - - - -N3组
点云颜色,指定为一个m-By-3或m——- - - - - -N3数组。使用此属性设置点云中的点颜色。每个条目指定点云数据中的点的RGB颜色。因此,您可以为每个点指定所有点或不同颜色的相同颜色。
指定的数据类型时,指定的RGB值必须在[0,1]范围内
颜色作为单身的或双倍的。指定的RGB值必须位于范围内[0,255],指定数据类型
颜色作为uint8.。
| 坐标 | 有效分配颜色 |
|
| m3组 | m-By-3数组,包含每个点的RGB值 |
|
| m——- - - - - -N3组 | m——- - - - - -N-By-3数组,包含每个点的RGB值 |
|

数据类型:uint8.
普通的-表面法线
[](默认)|m3组|m——- - - - - -N3组
表面法线,指定为am-By-3或m——- - - - - -N3数组。使用此属性指定相对于点云中的每个点的普通向量。曲面正常的每个条目指定X那y,Z.正常矢量的组成部分。
| 坐标 | 表面法线 |
|---|---|
| m3组 | m-by-3数组,每一行包含一个相应的法向量。 |
| m——- - - - - -N3组 | m——- - - - - -N-by-3数组包含每个点的1 × 1 × 3法向量。 |
数据类型:单身的|双倍的
强度-灰度强度
[](默认)|m-By-1矢量|m——- - - - - -N矩阵
每个点的灰度强度,指定为am1的向量或m——- - - - - -N矩阵。该函数将每个强度值映射到当前颜色映射中的一个颜色值。
| 坐标 | 强度 |
|---|---|
| m3组 | m- × 1向量,其中每行包含相应的强度值。 |
| m——- - - - - -N3组 | m——- - - - - -N矩阵包含每个点的强度值。 |
数据类型:单身的|双倍的|uint8.
数数-点数
正整数
此属性是只读的。
点云中的点数,存储为一个正整数。
xlimits.-范围的X坐标
1×2向量
此属性是只读的。
坐标范围X-轴,存储为1 × 2向量。
吉姆斯-范围的y坐标
1×2向量
此属性是只读的。
坐标范围y-轴,存储为1 × 2向量。
ZLimits-范围的Z.坐标
1×2向量
此属性是只读的。
坐标范围Z.-轴,存储为1 × 2向量。
对象功能
findNearestNeighbors |
在点云中找到一个点的最近邻居 |
findNeighborsInRadius |
在点云的一个点的半径内寻找邻居 |
findPointsInROI |
在点云中查找一个感兴趣区域内的积分 |
删除invalidpoints |
从点云中移除无效点 |
选择 |
在点云中选择点 |
复制 |
复制句柄对象数组 |
例子
创建一个点云对象并修改其属性
将3d坐标点读取到工作区中。
加载(“xyzPoints”);
根据输入点坐标创建点云对象。
ptcloud = pointcloud(xyzpoints);
检查点云对象的属性。
Ptcloud.
[-3 3.4338] YLimits: [-2 2] ZLimits:[0.0016 3.1437]颜色:[]正常:[]强度:[]
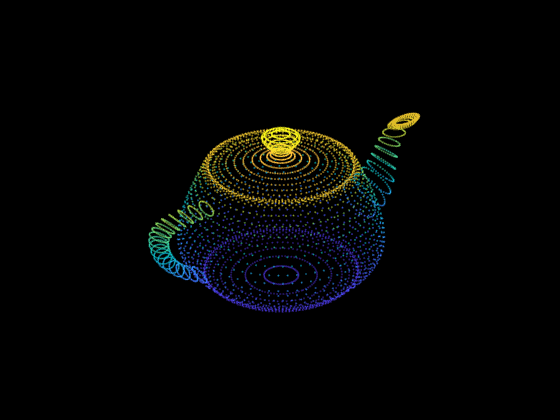
通过使用显示点云pcshow。
pcshow(ptcloud)
修改点云数据的颜色
创建RGB颜色阵列的大小与点云数据的大小相同。将点颜色设置为红色。
cmatrix = in(大小(ptcloud.location))。* [1 0 0];
使用设置为RGB颜色阵列的颜色属性创建点云对象。
ptcloud = pointcloud(xyzpoints,“颜色”,cmatrix);pcshow(ptcloud)

将曲面法线添加到点云数据
使用点云数据计算对应的曲面法线pcnormals。
法线= pcnormals(ptcloud);
从输入点坐标创建点云对象。将计算的曲面法线添加到点云对象。
ptcloud = pointcloud(xyzpoints,'普通的'、法线);
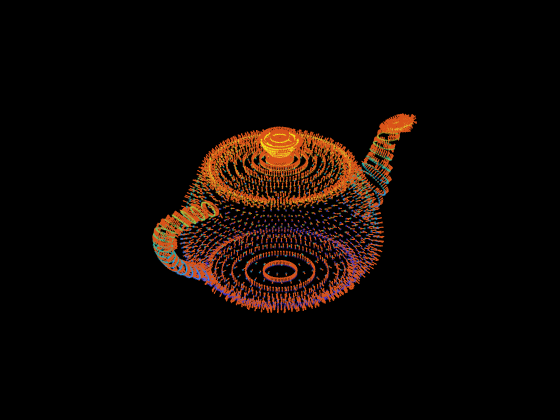
显示点云并绘制表面法线。
pcshow(ptCloud) x = ptCloud. location (:,1);y = ptCloud.Location (:, 2);z = ptCloud.Location (:, 3);u =法线(:1);v =法线(:,2);w =法线(:3);持有在quiver3 (x, y, z, u, v, w);持有从
提示
这pointCloud对象是一个处理目的。如果要创建一个点云的单独副本,则可以使用MATLAB®复制方法。
ptcloudb.=复制(Ptclouda.) |
如果希望保留点云的单个副本(可以通过点云函数进行修改),请对输入和输出使用相同的点云变量名。
Ptcloud.=PCFunction.(Ptcloud.) |
扩展能力
你也可以从以下列表中选择一个网站:
