主要内容
findpointsinroi.
在点云中查找一个感兴趣区域内的积分
描述
例子
在点云中查找长方体投资回报率
将点云数据读入工作区。
ptcloud =缺陷('茶壶.ply');
在范围内定义长方体投资单X那y和Z.输入点云的坐标。
ROI = [-2 2 -2 2 2.4 3.5];
找到在长方体ROI内的点数的指数。
indices = findpointsinroi(ptcloud,Roi);
选择躺在Cubod Roi中的点并存储为点云对象。
ptcloudb = select(ptcloud,索引);
在指定的ROI中显示输入点云和点云。
图pcshow(ptcloud.location,[0.5 0.5 0.5])保持上pcshow(ptcloudb.location,'r');传奇('点云'那'在ROI中的点'那'地点'那'southoutside'那'颜色',[1 1 1])保持离开
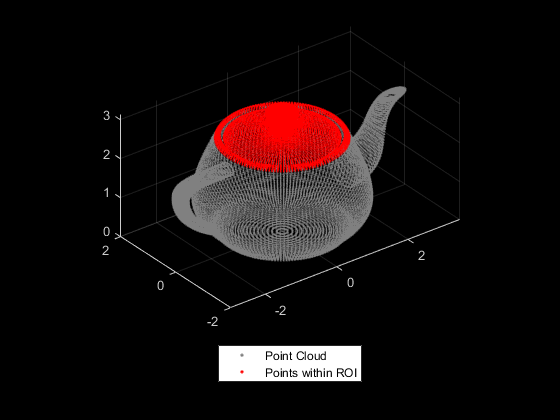
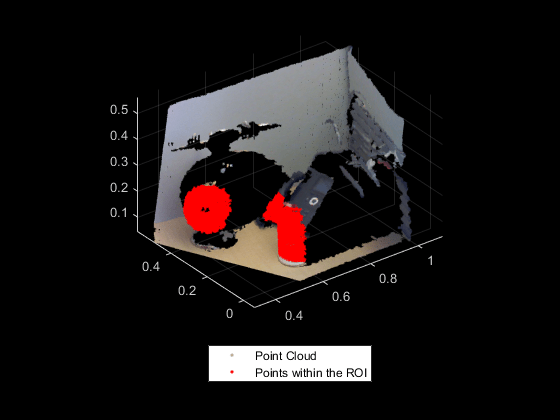
在有组织的点云中查找长方体投资形roi内的点
通过使用相机投影矩阵在有组织的点云数据中查找Cuboid ROI中的点。从采样点云数据点及其相应的图像点坐标计算摄像机投影矩阵。
将有组织的点云数据加载到工作区中。通过使用Kinect深度传感器生成点云。
ld = load('Object3d.mat');ptcloud = ld.ptcloud;
指定对点云数据采样的步长。
stepsize = 100;
示例输入点云并将采样的3-D点坐标存储为点云对象。
indices = 1:步骤化:ptcloud.count;tempptcloud = select(ptcloud,indices);
从采样点云中删除无效点。
[tempptcloud,validindices] = removeInvalidPoints(tempptcloud);
从输入点云获取3-D世界点坐标。
WorldPoints = tempptcloud.location;
找到与输入点云的3-D点坐标对应的2-D图像坐标。
[y,x] = IND2SUB([大小(PTCloud.Location,1),大小(PTCloud.Location,2)],指数);imagePoints = [x(validindices)'y(validindices)'];
从图像和世界点坐标估计相机投影矩阵。
cammatrix = rightatecameramatrix(Verippoints,WorldPoints);
在范围内指定长方体ROIX那y和Z.输入点云的坐标。
ROI = [0.3 0.7 0 0.4 0.1 0.3];
查找位于长方体ROI内的点云数据的指数。
indices = findpointsinroi(ptcloud,roi,cammatrix);
使用点云方法选择获取ROI内点的点云数据。
ptcloudb = select(ptcloud,索引);
显示输入点云和长方体ROI内的点。
图pcshow(ptcloud)保持上pcshow(ptcloudb.location,'r');传奇('点云'那'ROI内的点'那'地点'那'southoutside'那'颜色',[1 1 1])保持离开
输入参数
输出参数
参考
[1] Muja,M.和David G. Lowe。“具有自动算法配置的快速近似邻居”。在Visapp国际计算机视觉理论和应用中的国际会议中。2009.第331-340页。
扩展能力
也可以看看
在R2015A介绍
您还可以从以下列表中选择一个网站:
