estimateEssentialMatrix
从一对图像中对应的点估计本质矩阵
语法
描述
E= estimateEssentialMatrix (matchedpoints1.,matchedpoints2.,cameraParams)E,采用m估计样本一致性(MSAC)算法。输入点可以是米2的矩阵米的数量(x,y]坐标,或一个KAZEPoints,SURFPoints,MSERRegions,BRISKPoints,或cornerPoints对象。的cameraParams对象包含用于拍摄图像的相机的参数。
E= estimateEssentialMatrix (matchedpoints1.,matchedpoints2.,cameraParams1,cameraParams2)cameraParams1和cameraParams2是cameraParameters分别包含摄像机1和摄像机2参数的对象。
[此外返回一个米1逻辑向量,E,inliersIndex) = estimateEssentialMatrix (___)inliersIndex,用于计算基本矩阵。函数将向量的元素设置为真正的用相应的点来计算基本矩阵。元素被设置为假如果它们没有被使用。
[另外,返回一个状态码来指示点数的有效性。E,inliersIndex,状态) = estimateEssentialMatrix (___)
[___) = estimateEssentialMatrix (___,使用一个或多个指定的其他选项名称,值对参数。名称,值)
例子
从一对图像中估计基本矩阵
加载预计算的摄像机参数。
负载upToScaleReconstructionCameraParameters.mat
阅读并校正两幅图像。
imageDir = fullfile (toolboxdir (“愿景”),“visiondata”,...“upToScaleReconstructionImages”);图像= imageDatastore (imageDir);I1 = undistortImage (readimage(图片1),cameraParams);I2 = undistortImage (readimage(图片2),cameraParams);I1gray = im2gray (I1);I2gray = im2gray (I2);
检测每个图像的特征点。
imagePoints1 = detectSURFFeatures (I1gray);imagePoints2 = detectSURFFeatures (I2gray);
从每个图像中提取特征描述符。
features1 = extractFeatures (I1gray imagePoints1,“正直”,真正的);features2 = extractFeatures (I2gray imagePoints2,“正直”,真正的);
匹配图像的特征。
indexPairs = matchFeatures (features1 features2);matchedPoints1 = imagePoints1 (indexPairs (: 1));matchedPoints2 = imagePoints2 (indexPairs (:, 2));图showMatchedFeatures (I1、I2 matchedPoints1 matchedPoints2);标题('推定匹配')
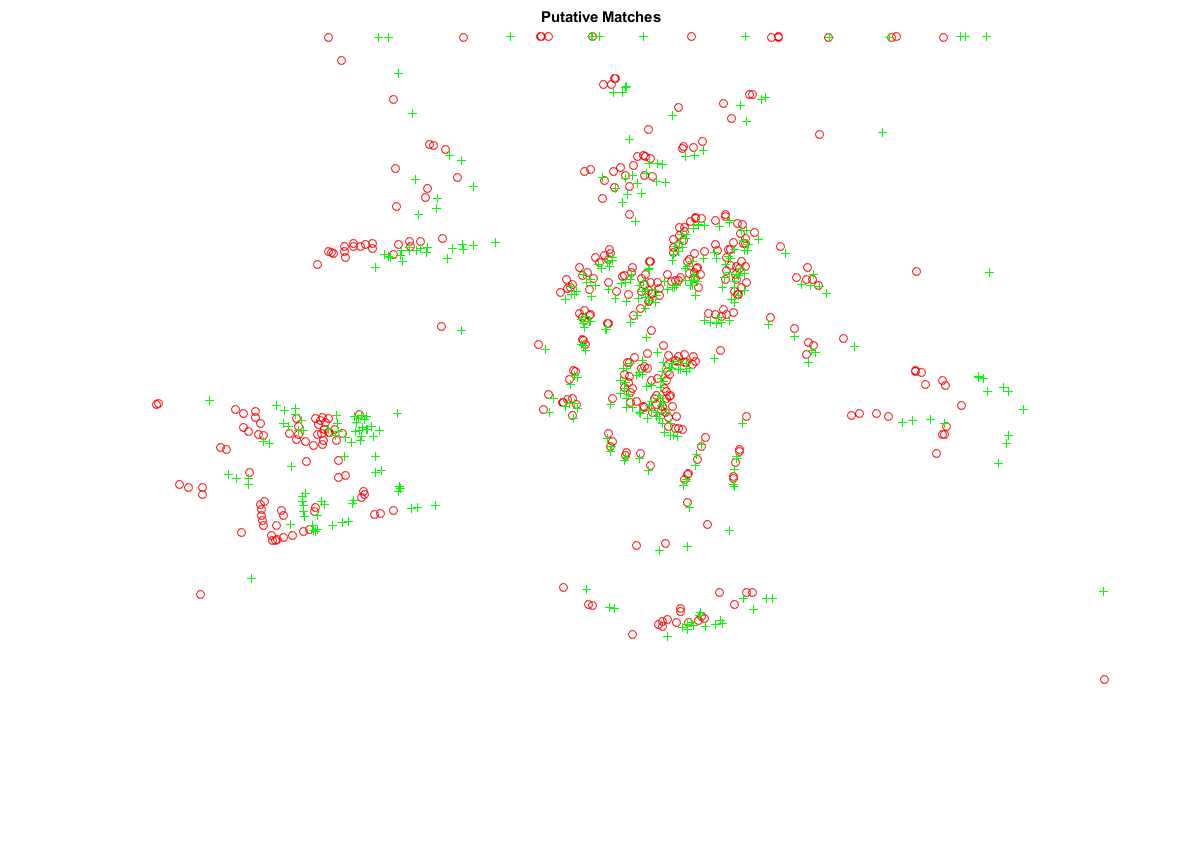
估计基本矩阵。
(E,内围层)= estimateEssentialMatrix (matchedPoints1 matchedPoints2,...cameraParams);
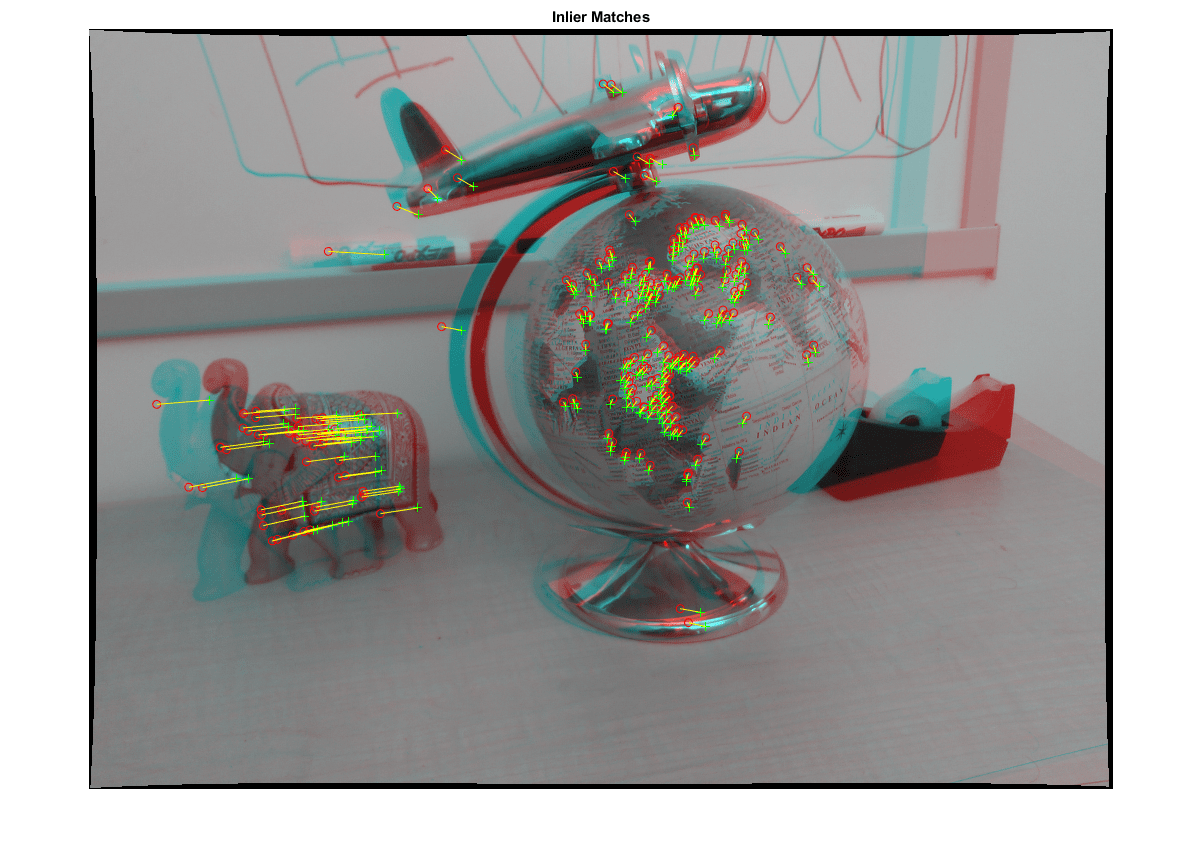
显示嵌套匹配。
inlierPoints1 = matchedPoints1(窗);inlierPoints2 = matchedPoints2(窗);图showMatchedFeatures (I1、I2 inlierPoints1 inlierPoints2);标题('Inlier Matches')
输入参数
输出参数
提示
使用estimateEssentialMatrix当你了解了相机的本质。您可以使用相机校准器应用程序。否则,您可以使用estimateFundamentalMatrix不需要相机固有功能。基本矩阵不能从共面世界点估计。
参考
Kukelova, Z., M. Bujnak, T. Pajdla5-pt和6-pt相对位姿问题的多项式特征值金宝搏官方网站解。英国利兹:BMVC, 2008。
[2] nist, D . .《五点相对姿态问题的有效解决方案》模式分析与机器智能学报。第26卷第6期,2004年6月。
Torr, P. H. S.和A. Zisserman。“MLESAC:一种新的用于估计图像几何的鲁棒估计器”。计算机视觉与图像理解。78卷,第1期,2000年4月,138-156页。
扩展功能
另请参阅
应用程序
功能
你也可以从以下列表中选择一个网站:
