主要内容
disparitysgm.
通过半全局匹配计算差异图
描述
disparitymap.= disparitysgm(I1那I2)I1和I2,通过使用半全局匹配(SGM)方法。了解更多关于纠正立体声图像,请参阅图像整流。
disparitymap.= disparitysgm(I1那I2那名称,价值)
例子
使用半全局匹配方法计算差异映射
加载纠正的立体对图像。
i1 = imread('rectized_left.png');i2 = imread('rectized_right.png');
创建纠正的立体声对图像的立体声,并显示它。您可以使用红云立体声眼镜在3-D中查看图像。
a =立体榕节(i1,i2);图imshow(a)标题('纠正立体声对图像的红云复合视图')

将整流的输入颜色图像转换为灰度图像。
J1 = RGB2GRAY(I1);J2 = RGB2GRAY(I2);
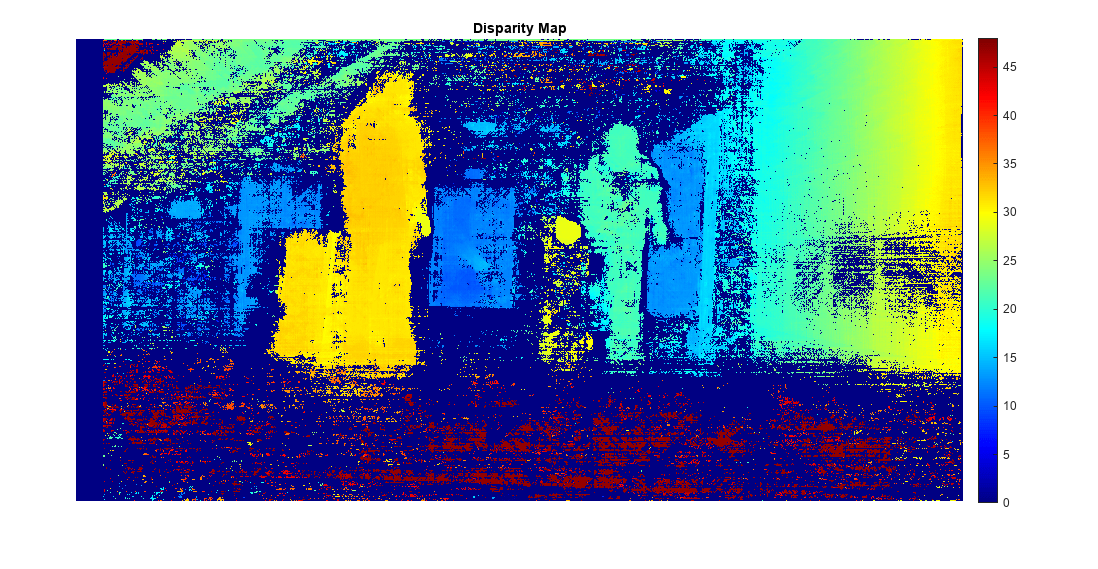
通过半全局匹配计算视差图。将视差范围指定为[0,48],以及唯一性的最小值为20。
dissarityrange = [0 48];dissaritymap = disparitysgm(J1,J2,'disparityrange',disparityrange,'唯一性察觉'20);
显示视差图。将显示范围设置为与视差范围相同的值。
数字imshow(DisparityMap,DisparityRange)标题('差异地图')ColorMap.喷射彩色栏
输入参数
输出参数
更多关于
算法

参考
[1] Hirschmuller,H“通过半全球匹配和相互信息准确和高效的立体声处理。”在计算机愿景和模式识别的IEEE会议的诉讼程序(CVPR),pp。807-814。圣地亚哥,加利福尼亚州:IEEE,2005。
扩展能力
在R2019A介绍
您还可以从以下列表中选择一个网站:
