extractFeatures
提取兴趣点描述符
描述
例子
从图像中提取角特征。
阅读图像。
我= imread (“cameraman.tif”);
查找并提取角落功能。
角落=探测器(i);[功能,valid_corners] =提取物(i,corners);
显示图像。
图;imshow(我);持有在

绘制有效的角点。
情节(有效_corners);

从图像中提取SURF特征
读图像。
我= imread (“cameraman.tif”);
查找和提取功能。
点=检测(I);[功能,有效_Points] =提取物(i,点);
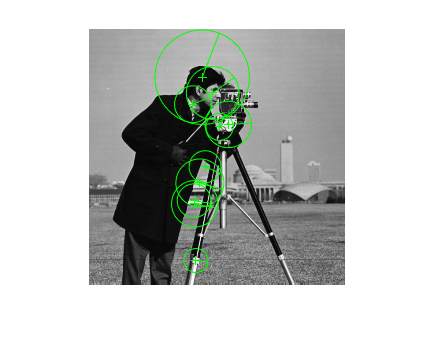
显示和绘图十大最强的SURF功能。
图;imshow(我);持有在;情节(valid_points.selectStrongest (10),'摇针',真正的);
从图像中提取MSER特征
读图像。
我= imread (“cameraman.tif”);
使用MSER使用Surf功能描述符查找功能。
区域= detectMSERFeatures(我);[features, valid_points] = extractFeatures(I,regions,'直立',真正的);
显示与MSER椭圆中心对应的冲浪功能。
图;imshow(我);持有在;情节(valid_points'摇针',真正的);

输入参数
输出参数
参考
Bradski和Kaehler,学习OpenCV:与OpenCV库的计算机愿景, O'Reilly, Sebastopol, CA, 2008。
[2] Herbert Bay,Andreas Ess,Tinne Tuytelaars,Luc Van Gool,冲浪:加速强大的功能“,计算机视觉和图像理解(CVIU),卷。110,3,PP。346--359,2008
[3] Bay,Herbert,Andreas Ess,Tinne Tuytelaars和Luc Van Goole,“Surf:加快强大的功能”,计算机愿景和图像理解(CVIU),卷。110,3,PP。346--359,2008。
[4] Alahi,Alexandre,Ortiz,Raphael和Pierre Vandergheynst,“Freak:Fast Retina Keypoint”,IEEE计算机愿景和模式识别, 2012年。
[5] Alcantarilla,P.F.,A. Bartoli和A.J.戴维森。“Kaze特点”,ECCV 2012,第VI部分,LNCS 7577214年,2012页
扩展功能
也可以看看
Kazepoints.|MSERRegions|ORBPoints|SURFPoints|二进制文件|检察机构|detectFASTFeatures|探测器法|detectKAZEFeatures|检测器饲料|detectMinEigenFeatures|detectORBFeatures|探测拍摄|骨折比重|extractLBPFeatures|matchFeatures
在R2011A介绍
您还可以从以下列表中选择一个网站:
