基于功能的全景图像拼接
这个例子展示了如何使用基于特征的图像配准技术自动创建全景图。
概述
特征检测和匹配是许多计算机视觉应用中使用的强大技术,例如图像配准,跟踪和对象检测。在该示例中,基于特征的技术用于自动缝合一组图像。图像拼接的过程是基于特征的图像配准的扩展。代替注册一对图像,多个图像对相对于彼此连续地登记以形成全景。
第1步 - 装载图像
此示例中使用的图像集包含建筑物的图片。通过沿着地平线从左到右扫描相机,捕获建筑物的所有部位,用未凝砖的智能手机摄像头拍摄。
如下所示,图像相对不受任何镜头畸变的影响,所以不需要相机校准。然而,如果镜头失真,相机应该校准和图像未失真之前创建全景。你可以使用相机校准器应用程序校准相机,如果需要。
%加载图像。buildingDir = fullfile (toolboxdir (“愿景”),“visiondata”,“建筑”);buildingScene = imageDatastore (buildingDir);显示要缝合的图像。蒙太奇(Buildingscene.Files)

步骤2 -注册图像对
要创建全景,请首先使用以下过程注册连续图像对:
检测和匹配之间的特征 和 .
估计几何变换, ,地图 来 .
计算映射的转换 进入全景图像为 .
%从图像集中读取第一图像。I = readimage (buildingScene, 1);%初始化i(1)的功能grayImage = im2gray(我);点= detectSURFFeatures (grayImage);[features, points] = extractFeatures(grayImage,points);%将所有转换初始化为身份矩阵。请注意%投影变换在这里使用,因为建筑图像是公平的靠近相机。如果这个场景是从远处拍摄的,一个仿射变换就足够了。numImages =元素个数(buildingScene.Files);tforms (numImages) = projective2d(眼(3));%初始化变量以保持图像大小。图象尺寸= 0 (numImages, 2);%遍历剩余的图像对为n = 2: numImages%存储I(n-1)的点和特性。pointsPrevious =点;featuresPrevious =功能;%读我(n)。I = readimage(buildingScene, n);将图像转换为灰度。grayImage = im2gray(我);%保存图像大小。图像中的(n,:) =大小(灰度);%检测并提取I(n)的SURF特征。点= detectSURFFeatures (grayImage);[特征,点] =提取物(灰度,点);找出I(n)和I(n-1)之间的对应关系。indexpairs = matchfeatures(特征,特点是previous,'独特',真正的);matchedPoints = points(indexPairs(:,1),:);matchedPointsPrev = pointprevious (indexPairs(:,2),:); / /索引%估计I(n)和i(n-1)之间的转换。tforms(n)= estimategeometrictransform2d(匹配点,matchedpointsprev,...“射影”,'置信度', 99.9,“MaxNumTrials”,2000);%计算T(n) * T(n-1) *…* T (1)tforms(n).t = tforms(n).t * tforms(n-1).t;结束
此时,所有转换扭曲与第一图像相对。这是编写图像登记过程的便捷方式,因为它允许顺序处理所有图像。然而,在全景的开始时,使用第一张图像不会产生最美观的全景,因为它倾向于扭曲形成全景的大部分图像。可以通过修改变换来创建更好的全景,使得场景的中心是最不扭曲的。这是通过反转中心图像的变换并将其应用于所有其他变换来实现的。
首先使用projective2d.输出方法查找每个转换的输出限制。然后使用输出限制来自动找到大致位于场景中心的图像。
%计算每个变换的输出限制。为i = 1:元素个数(tforms) [xlim(我,:),ylim(我,:)]= outputLimits (tforms(我),(1)图象尺寸(我,2)]、[1图象尺寸(我,1)));结束
接下来,计算每个变换的平均X极限,并找到位于中心的图像。这里只使用X限制,因为场景是水平的。如果使用另一组图像,则可能需要使用X和Y限制来找到中心图像。
avgXLim = mean(xlim, 2);[~, idx] = (avgXLim)进行排序;地板centerIdx =((元素个数(tforms) + 1) / 2);centerImageIdx = idx (centerIdx);
最后,将中心图像的逆变换应用于所有其他。
tinv =反转(tforms(centerimageidx));为I = 1:numel(tforms) tforms(I)。T = tforms(我)。T * Tinv.T;结束
第3步 - 初始化全景
现在,创建一个初始,空,全景,所有图像都被映射到其中。
使用输出在所有转换上计算最小值和最大输出限制的方法。这些值用于自动计算全景的大小。
为i = 1:元素个数(tforms) [xlim(我,:),ylim(我,:)]= outputLimits (tforms(我),(1)图象尺寸(我,2)]、[1图象尺寸(我,1)));结束maxImageSize = max(图象尺寸);找出最小和最大输出限制。xmin = min([1; xlim(:)]);xmax = max([maximagesize(2); xlim(:)]);ymin = min([1; ylim(:)]);ymax = max([maximagesize(1); ylim(:)]);%全景图的宽度和高度。宽度=圆形(xMax - xMin);height = round(yMax - yMin);%初始化“空”全景图。Panorama = Zeros([高度宽度3],'像', 一世);
步骤4 -创建全景图
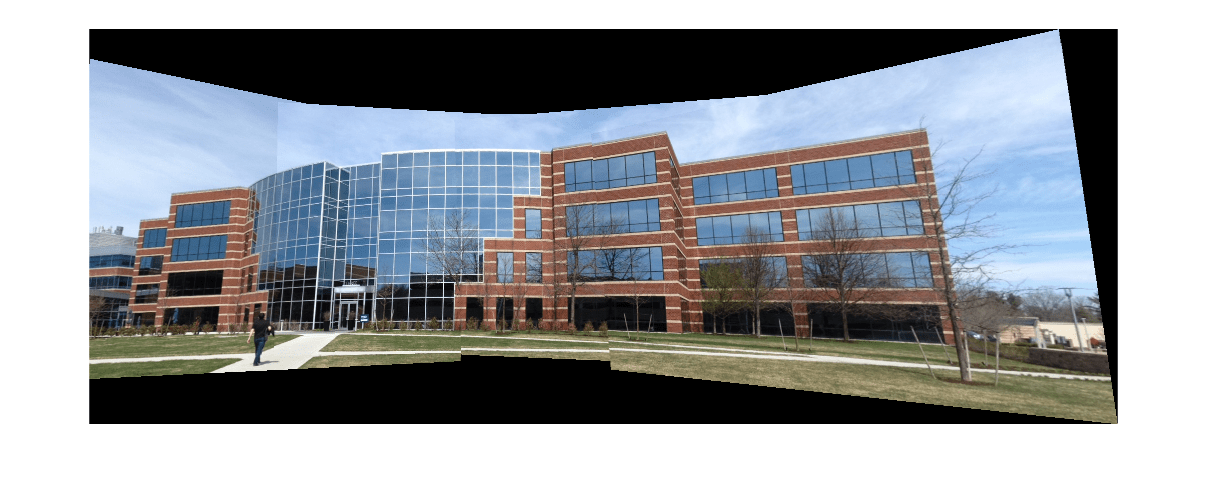
采用imwarp将图像映射到全景图中并使用Vision.Alphablender.将图像叠加在一起。
Blender = Vision.Alphablender(“操作”,'二进制面具',...“MaskSource”,输入端口的);%创建一个2-D空间参考对象,定义全景图的大小。xLimits = [xMin xMax];yLimits = [yMin yMax];全景视图= imref2d([height width], xLimits, yLimits);创建全景图。为i = 1:numImages i = readimage(buildingScene, i);%把我变成全景。= imwarp(I, tforms(I)),'OutputView',panoramaview);%生成二进制掩码。mask = imwarp(true(size(I,1),size(I,2)), tforms(I),'OutputView',panoramaview);%将Warpedimage覆盖到全景上。Panorama =步骤(搅拌机,全景,Warpedimage,面具);结束图imshow(全景)
结论
此示例显示了如何使用基于特征的图像登记技术自动创建全景。可以将额外的技术结合到示例中以改善全景图像的混合和对准[1]。
参考
[1]马修棕色和大卫G. Lowe。2007.使用不变功能的自动全景图像拼接。int。J. COPPLE。Vision 74,11(2007年8月),59-73。
您还可以从以下列表中选择一个网站:
