主要内容
探测
使用YOLO V3对象检测器检测对象
句法
描述
例子
使用YOLO V3对象检测器检测对象
加载普雷雷y yolo v3对象探测器。
探测器= yolov3objectdetector('tiny-yolov3-coco');
通过使用使用读取测试图像并预处理测试图像预处理功能。
img = imread ('sherlock.jpg');img =预处理(探测器,img);
检测测试图像中的对象。
[Bboxes,Scores,标签] =检测(探测器,IMG);
显示检测结果。
结果=表(Bboxes,标签,分数)
结果=1×3表bboxes标签分数 ________________________ ______ _______ 134年69 280 272 0.56819的狗
detectedImg = insertObjectAnnotation (img,'矩形',bboxes,标签);图imshow(detectedimg)

从存储在图像数据存储中的图像中检测对象
加载佩带的yolov3对象探测器。
探测器= yolov3objectdetector('tiny-yolov3-coco');
阅读测试数据并存储为图像数据存储对象。
位置= fullfile(matlabroot,'工具箱'那'想象'那'VisionData'那'车辆');IMDS = IMAGEDATASTORE(位置);
检测测试数据集中的对象。设定阈值参数值为0.3和小匹匹匹匹配参数值为32。
检测=检测(探测器,IMDS,'临界点',0.3,'minibatchsize'、32);
从测试数据集中读取图像并提取相应的检测结果。
num = 10;我= readimage (imd, num);bboxes = detectionResults.Boxes {num};标签= detectionResults.Labels {num};成绩= detectionResults.Scores {num};
执行非最大抑制以从重叠群集选择最强的边界框。设定OverlapThreshold参数值为0.2。
[bboxes,sicrors,labels] = selectstrongestbbox multiclass(bboxes,scores,标签,'重叠阈值',0.2);
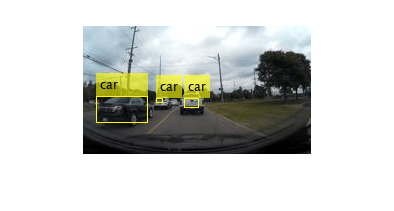
显示检测结果。
结果=表(Bboxes,标签,分数)
结果=3×3表Bboxes标签分数__________________________________ 14 71 52 27 CAR 0.93352 74 73 7 5 CAR 0.65369 102 73 15 10 CAR 0.85313
detectedimg = InsertObjectAnnotation(I,'矩形',bboxes,标签);图imshow(detectedimg)
检测ROI中的对象
加载普雷雷y yolo v3对象探测器。
探测器= yolov3objectdetector('tiny-yolov3-coco');
阅读测试图像。
img = imread (“highway.png”);
指定测试图像中的感兴趣区域(ROI)。
roibox = [70 40 100 100];
检测指定ROI中的对象。
[Bboxes,Scores,标签] =检测(探测器,IMG,ROIBOX);
显示ROI和检测结果。
结果=表(Bboxes,标签,分数)
结果=1×3表Bboxes标签分数____________________________________________99 103 41 33 CAR 0.72206
img = InsertObjectAnnotation(IMG,'矩形',roibox,'roi'那“颜色”那“蓝色”);detectedImg = insertObjectAnnotation (img,'矩形',bboxes,标签);图imshow(detectedimg)

输入参数
输出参数
在R2021A介绍
您还可以从以下列表中选择一个网站:
