立体声愿景是从场景的多个2D视图中提取3D信息的过程。立体视觉用于高级驾驶员辅助系统(ADA)和机器人导航等应用中,其中立体视觉用于估计来自相机的实际距离或感兴趣对象的范围。
通过估计场景中的相对点,可以从一对图像从一对图像获得3D信息,也可以从一对图像获得。这些估计在立体声差异图中表示,其通过匹配立体对中的对应点来构造。

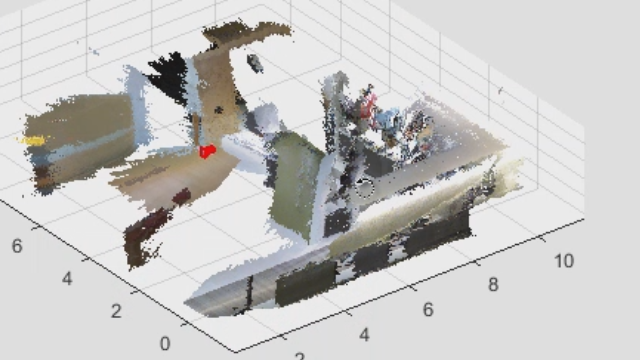
使用一对立体图像(左上角和右上角)重建场景。为了可视化视差,右声道与左声道组合以创建复合(中左)。还示出了场景(中右)的视差图和场景(底部中心)的3D渲染。查看matlab代码和解释示例。
立体图像被纠正以简化匹配,从而可以在另一个图像中的同一行中找到一个图像中的对应点。这将2D立体声对应问题降低到1D问题。立体图像整流有两种方法,校准和未校准整流。通过确定一组匹配的兴趣点,估计基本矩阵,然后导出两个投影转换来实现未校准的立体图像整流。校准的立体声整流使用立体声相机校准过程的信息。

纠正的立体声图像对。请注意,匹配点驻留在同一行上。查看matlab代码和解释示例。
显示校准的立体图像整流的立体声骨骼。参见MATLAB代码示例和解释。
立体声相机校准用于确定立体声对中相机的内在参数和相对位置,该信息用于立体整流和3D重建。

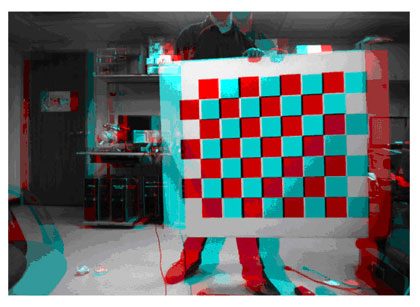
使用使用检查板模式校准立体声对立体声相机校准器应用程序。
立体视觉也用于3D动画录制和生产,对象跟踪,机器视觉和范围感应等应用。有关立体视觉的更多信息,请参阅计算机视觉工具箱™。