计算机视觉的工具箱
本系统提供人工视觉、3D视觉和视频视觉

计算机视觉工具箱™提供算法,应用程序,用于测试人工视觉,3D视觉,制作视频。你可以给我一个拥抱,给我一个拥抱,给我一个拥抱。每个quanto rigarda visionone 3D, il工具箱支持校准单,立体声摄金宝app像机鱼眼;mondo visione立体声;立克曲氮酮三维精密激光雷达。这是一款可以自动为客人拍照的人工智能相机。
Puoi addestrare rilevatori di oggetti personalizati usezzando algorithm di deep learning e machine learning come YOLO v2, Faster R-CNN e ACF。根据segmentazione语义,我们利用算法深度学习来SegNet, U-Net和DeepLab。我对所有人的看法都一致,我对所有人的看法都一致。
È可能的velocizzare gli算法i eseguendoli su GPU e Processor多核。工具库的算法支持通用代码C/C++per l'Integratione con il codice esistente,桌面和嵌入式系统的协金宝app议。
乌拉岛:

一切都是一致的
加德斯特雷框架,奥格蒂·莱瓦托里·科莫·约洛v2发行版,更快的R-CNN,ACF e维奥拉·琼斯发行版。奥盖蒂理工学院(riconoscimento oggetti)的funzione包括一袋视觉文字e OCR。我是rilevano volti预加模型,我是pedoni e altri Oggeti comuni。


奥格蒂·特拉米特的赖尔瓦齐昂,R-CNN。
Segmentazione semantica
分段式三维图像分类,单个像素和体素视网膜质量,FCN,U-Net e DeepLab v3+。

Etichettatura南草原
根据视频标签和图像标签的应用程序,自动实现场景的语义分割和分类。

南坎波应用程序视频贴标机。
I/O nuvole di punti e激光雷达
Leggi,scrivi e Visualiza le nuvole di punti da文件,激光雷达和传感器RGB-D。

punti nuvole登记处
采用正态分布变换(NDT)、迭代最近点(ICP)和相干点漂移(CPD)三种方法进行三维新图像的配准。

在punti的nuvole注册一个缝合系列。
分段式Z形配件
集群中的punti nuvole分段,用于几何图形,所有punti nuvole。guida Automaticzata e di Robotia中的dati LIDAR中的piano分段。

努沃拉·迪蓬蒂激光雷达。
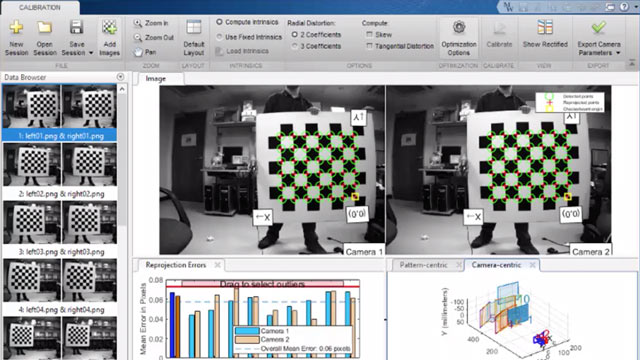
单镜头摄影
Automaticza la rilevazione della scacchiera e calibra le fotocamere针孔e fisheye con la app摄像机校准器。
Calibrazione di foiscamera立体声
在3D场景中,每个calcolare la profonditáe ricostruire场景都有一个铜杯立体。

应用立体声相机校准器。
Visione 3D
视觉测径仪。

多维斯塔公寓。

这是一个立体地图,它代表着一个共同的主题。
Rilevazione、estrazione和di特征对抗
莱莱娃,埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉伊·埃斯特拉。

在一个场景里,我们必须要面对这个场景。
我们想象有这样的特征
每种刺激中的对抗性特征表现为内在几何形态的转换和内在顺序的注册。

Panorama creato con registrazione basata sulle地貌。

这是一条铁路线,它是一条铁路线。
电影节
在整个视频帧中,所有的视频都是流动的,所有的视频都是在blocchi和modelli中进行的。

奥格蒂的《足球运动》中的莱尔瓦齐昂。

Generazione di自由配置
通用代码C/C++,根据funzioni di工具箱,分类,系统对象e blocchi。

视频图像标签
复制一个像素;帕诺拉米卡;米格里奥拉塔框架酒店;线性投资回报率(ROI),归属于图像标签机
每个人都有自己的想法
精神创伤和精神创伤
Segmentazione semantica
在immagini e volumi 3D utilization rei DeepLab v3+ e 3D U-Net中,classificazione di singoli pixel
深入学习
这是戴尔公司的端到端R-CNN附加服务,包括安科拉吉奥和伊玛吉尼多分析公司的数据利用率
Accelerazione深度学习
ottimizzazione YOLO v2 e segmentazione semantica Utilizando l’accelerazione MEX
瓜达勒注意di rilascio根据其他信息,请提供相关信息。
