。
カスケードpiコントローラーを使使用ししbldcモーターの速度制御
この例では,金宝appSimulinkでで既存のプラントののコントローラーをを调整するするののでについてについて说ししますここではははp ppますますますを使pしてカスケードカスケードカスケードカスケード构でをののコントローラーコントローラーをを调整ししますerererererererererererは,闭ループ実験によりプラントににを与え幅付近推定れ帯域の周波で推定れ调整の周波応答にloop loop调整を実実し循环pid自动箱ブロックとloop loop aut,ここは対照的に闭じたままと,自动调整プロセス中に初のコントローラーゲインははんません。
BLDCモーターモデル
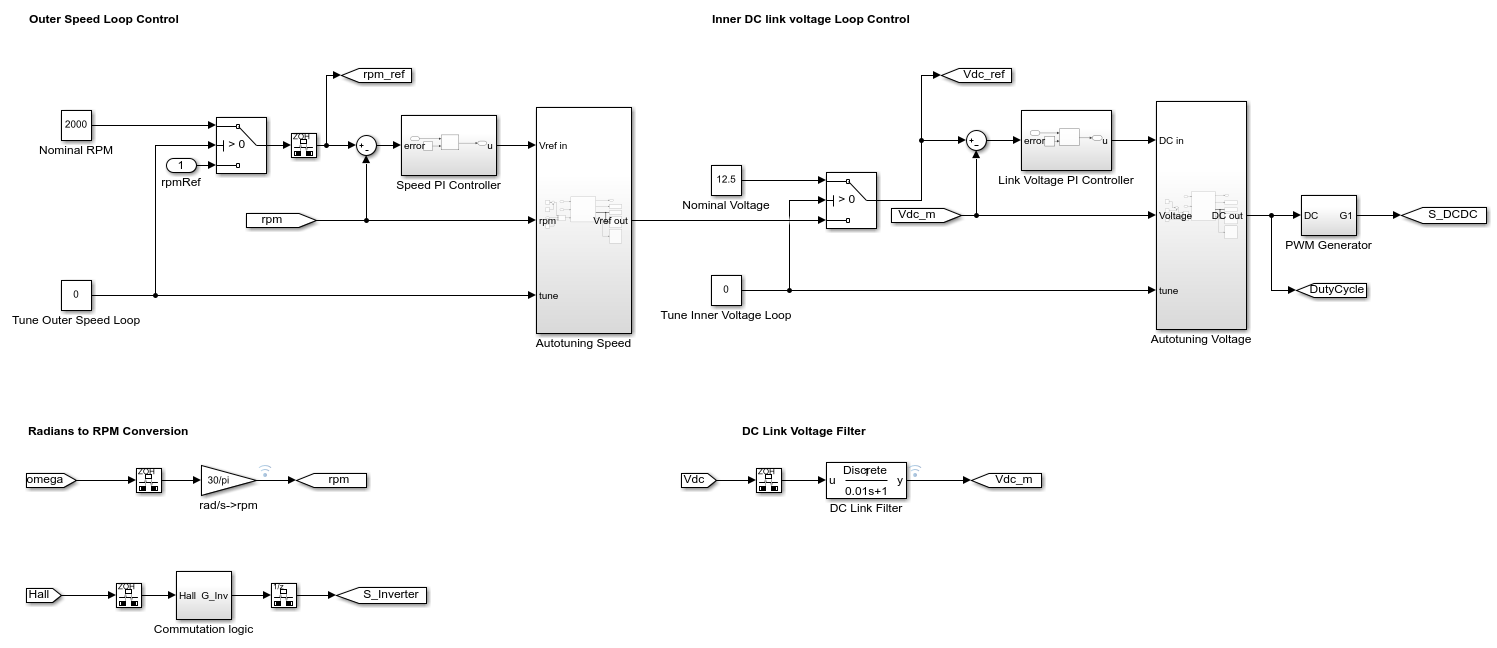
この例のモデルは,降圧コンバーターをもつ三相bldcモーターと,三相インバーター电力リンクをしコンバーターmosfetででモデルモデルさ,は,,デバイスの抵抗と特性正式表现されるよう,理论的なスイッチではなくIGBTでモデル化され。半导半导ゲートをしてて両のコンバーターリンクとインバーター,これによりの速度制御ことができ,これこれによりモーターの速度が制御され
mdl ='scdbldcspeedcontrol';Open_System(MDL);

モーターモデルは次のようになります。
p = 4;%杆对数Rs = 0.1;每相的%定子抗性[欧姆]ls = 1e-4;每相自定子自感,LS [H]MS = 1E-5;%定子互感,MS [H]PSIM = 0.0175;%最大永磁磁通连杆[WB]JM = 0.0005;%转子惯性[kg * m ^ 2]TS = 5E-6;%基本采样时间[S]TSC = 1E-4;内部控制环的%采样时间[S]VDC = 48;%最大直流链路电压[V]
モデルは内侧のDCリンク电视ループとと外侧モーター速度ループの2つのカスケードpiコントローラーコントローラー使使て,安定し闭ループ动作をする事前设定れれ。
kpw = 0.1;速度控制器的%比例增益kiw = 15;速度控制器%积分器增益kpv = 0.1;电压控制器的%比例增益kiv = 0.5;电压控制器%积分器增益
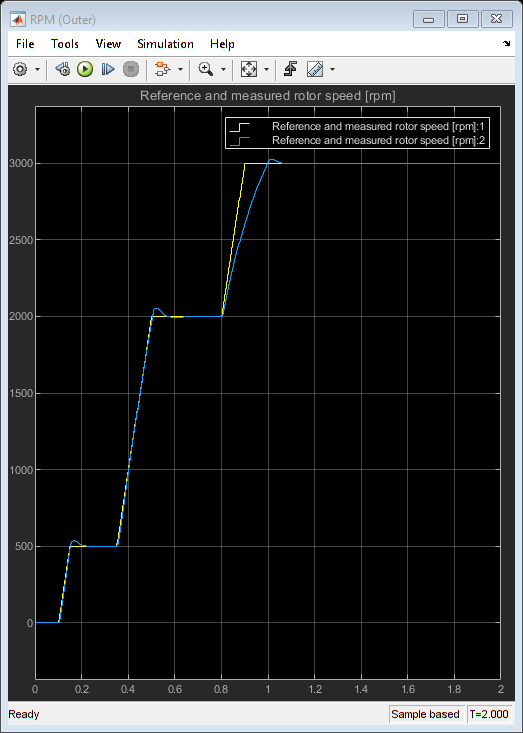
追従性能をテストするするため信号,0〜500 rpm,500〜2000 rpm,および2000〜3000rpmの一连の速度ランプ。モデルモデル初初コントローラーゲインゲインシミュレートとと,追従応答が遅く,コントローラーコントローラー再再キャリブレーションが必要必要であること示していいを示してい
Open_System([MDL'/可视化/ RPM(外)']);SIM(MDL);

闭环PID自动箱ブロックの设定
この例では,闭环PID自动箱ブロックを使使てコントローラーを改善ブロックししますこれら性能ブロックブロックループループ闭じての数周波応答を推定してからの周波周波をを推定てからからの周波周波ををからからから.Controlサブサブシステムを,自动调速速度サブサブシステム自动调谐电压サブシステムの闭环PID自动箱ブロックを确认します。
Open_System([MDL'/控制']);
にた,内侧を调整ます调整状态でのますを状态ののループ调整状态ののループを状态で。
PIDコントローラーの调整要件を指定には,各pid自动调整器材ブロック[调整]タブタブパラメーターを使使。この例のコントローラー并列,离散コントローラーのpiコントローラー。秒です。
どちらのコントローラーも[ターゲットの位相余裕]は60度度,性能とロバスト性の良好なバランスを提供しします。
外侧の速度ループの制御には,[ターゲットの帯域幅]に100ラジアン/秒を选択しののさによってのはは幅ラジアンされターゲット选択帯域幅幅の値によって选択し幅のの値によってによってににの値によってによってによってにますます値値によってによってますにに値値によって値ににます値によってループのコントローラーよりも高速な応答をもつになりますますますますますます。
闭环PID AutoTunerブロックブロック,闭闭ループ実験を実してプラントの数応答取得ししししをブロックパラメーターのののので指定しししここここここ指定ししししここし[プラントプラント符号]は[正]であり,旧格式作业点のプラント力における正の変変,プラントが新闻定常に达したたときプラントプラントにこのののようじじ定ます例のようにプラントががののようにプラント定のののはそのdcゲインのの符に等しくなります。
自动调整プロセス中に插入さ正式の振幅には使使て,プラントの饱和极限内ありながら,プラントが确実に正当励起れるようにし。调整ブロックで応答信号をエレクトロニクス回路にあるリップル区别する
内侧のループのpiコントローラーの调整
内侧のループのコントローラーの调整ををシステムするに,自动电压サブシステムで,常数ブロックの曲内部电压环を1に设定します。これは基本的に外侧のを中间し,代わりに定格(参数)12.5を使使し。
set_param([mdl'/控制/调谐内部电压环'],'价值'那'1');
また,常数ブロックブロック曲面外速环を0に设定して外侧のの调整调整无效ににししし
set_param([mdl'/控制/调整外速循环'],'价值'那'0');
この设定は,1〜1.8秒のシミュレーションシミュレーションでループ调整実験を実いるようにされているいるにaut autブロックをを最初のののをををのををををををををををををををををををををに达します。闭闭ループ実験の时间として适切推定は200 /目标带宽です.Closed循环PID AutoTunerブロックブロック%dirm.出力を使用して実験の进捗状况をししし%dirm.信号线100%の近くで安防したに终了することできますできできますます。
シミュレーションを実行。実験実験完了すると,闭环PID自动箱ブロックは内侧の电阻ループのされたpidコントローラーゲインをますます。voltageloopgaine.としてmatlabワークワークスペースにに送ししし
close_system([MDL'/可视化/ RPM(外)']);Open_System([MDL'/可视化/ VDC(内部)']);SIM(MDL);

内侧のループのpiコントローラーコントローラー新闻ゲインで新します。
kpv = voltageloopgains(1);KIV = Voltageloopgains(2);
外侧のループのpiコントローラーの调整
次に,外侧の速度ループをます.Autotuning电压サブサブで,常数ブロック调低内部电压环の値0に変更して内侧电阻ループ调整を无效します。新しく调整されたゲインを既に使てていることことし注意てて
set_param([mdl'/控制/调谐内部电压环'],'价值'那'0');
同様に,自动调速サブシステム,サブシステム自动调速のののの曲面ののののののにして外荷のループの调整ををににますますループは,闭ループの自动调整调整。し,1秒から开始します调整の格速度は2000rpmです。
set_param([mdl'/控制/调整外速循环'],'价值'那'1');
シミュレーションを再び実行。実験が完了すると,闭环PID autとブロックが外侧のループの调整れたpidコントローラーコントローラーコントローラーを返し。Speedloopgains.としてmatlabワークワークスペースにに送ししし
close_system([MDL'/可视化/ VDC(内部)']);Open_System([MDL'/可视化/ RPM(外)']);SIM(MDL);

外侧のループのPIコントローラーを新闻ゲインで新します。
kpw = speedloopgains(1);kiw = speedloopgains(2);
自动调整调整后の追従性能の
これで,大bldcモーターモータープラントモデルの制御の性能を改善改善ためののコントローラーコントローラーののゲインを调整调整しましたするさたコントローラーコントローラー性能性能ににははコントローラーはははののはのののののののののののののののののののののののののののののの
set_param([mdl'/控制/调谐内部电压环'],'价值'那'0');set_param([mdl'/控制/调整外速循环'],'价值'那'0');
调整されれたゲイン,テストランプ信号のが改善さます。
SIM(MDL);
参考
关键词トピック
您还可以从以下列表中选择一个网站: