このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
金宝appでのリアルタイムのPID自動調整の制御
PID自動調整器ブロックを展開することにより,ループ内に仿真金宝app软件®がなくてもシステムをリアルタイムで調整できるようになります。ただし,金宝app仿真软件から実験を制御しながら,ハードウェア上で自動調整アルゴリズムを実行すると便利な場合があります。
これを行う1つの方法として,PIDコントローラーとPID自動調整器ブロックを含むモデルを使用して,そのモデルをエクスターナルシミュレーションモードで実行することができます。エクスターナルモードにより,仿金宝app真软件ブロック線図と生成コードから作成されるスタンドアロンプログラムとの間の通信が可能となります。このモードでは仿金宝app真软件が,ハードウェアで実行中の調整アルゴリズムとの対話が可能なリアルタイムの監視インターフェイスとして機能します。たとえば,モデルの実行中に,金宝app仿真软件インターフェイスから実験を開始や終了したり,調整目標を変更したりできます
エクスターナルモードで調整を行う場合,実験アルゴリズムのみを展開して,計算のPID調整部分は仿真软件金宝appで実行されるようにすることができます。これにより,ターゲットハードウェア上のメモリを節約できます。PID自動調整アルゴリズムをエクスターナルモードで実行するには,金宝appSimulink Coder™などのコード生成製品が必要です。
エクスターナルモードでの調整のための金宝appモデル
PID自動調整をエクスターナルモードで行うための仿真软金宝app件モデルは,次の図のようになります。

ここでは从硬件读取工厂输出と将工厂输入写入硬件というブロックが,物理プラントとの間でデータの読み書きを行うハードウェアインターフェイスを表します。調整の準備が整ったら,このモデルをエクスターナルシミュレーションモードで実行します。
開ループ調整のバンプレス切り替え
开环PID自动箱を使用するときは,コントローラーに積分器アクションが含まれる場合,調整実験中の積分器のワインドアップを防ぐために信号のトラッキングを実装することを検討してください。信号のトラッキングにより,PIDコントローラーが,ループの外にある間も実際のプラント入力をトラッキングし続けることができます。そうでないと,調整プロセスの終わりに制御ループを閉じる時点でシステムにバンプが生じる可能性があります。
PIDコントローラーが仿真金宝app软件PID控制器ブロックである场合,コントローラーブロックの[トラッキングモードを有効にする]パラメーターを使用してこのバンプを回避できます。次のブロック線図は,トラッキングモードが構成されている开环PID自动箱ブロックおよびPID控制器ブロックを含むモジュールを示しています。プラント入力はコントローラーブロックのトラッキング入力に接続しています。

エクスターナルモードの調整では,金宝app仿真软件でモデル化されたプラントのPID自動調整で説明されているように开始停止信号を構成します。ここに示されているモデルは,バイナリ信号をもつ単純なスイッチを使用して実験を手動で開始および終了します。
コントローラーパラメーター,調整目標,および実験パラメーターを,金宝app仿真软件でモデル化されたプラントのPID自動調整で説明されているように構成することもできます。
モデルの実行とコントローラーゲインの調整
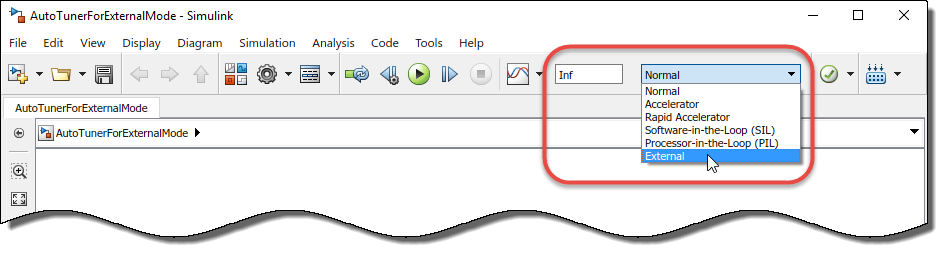
ブロックのパラメーターを実験用に構成した後,モデルで[エクスターナルモード]を選択して,シミュレーション時間を無限大に設定し,モデルを実行します。
金宝app仿真软件がモデルをコンパイルして,接続されているハードウェアに展開します。
特定の時間で調整プロセスを開始および終了するように
启动/停止信号を構成した場合,実験が終了するまでシミュレーションを実行するよう許可します。手動の
启动/停止信号を構成した場合,プラントが定常状態に達したときに実験を開始します。% conv出力で信号を観察し,信号が100%の近くで安定した時点で実験を終了します。
調整が完了したら,金宝app仿真软件でモデル化されたプラントのPID自動調整で説明されているように調整されたゲインを確認して検証します。
金宝app仿真软件を介して自動調整プロセスを制御するためにエクスターナルモードを使用する詳しい例は,开环PID自动调谐ブロックを使用したPIDコントローラーのリアルタイム調整を参照してください。
エクスターナルモード使用時のメモリフットプリントの削減
自動調整器ブロックには,リアルタイムの周波数応答推定を実行するモジュールと,結果の推定応答を使ってPIDゲインを調整するモジュールの,2つのモジュールが含まれています。既定では,ブロックを含む仿金宝app真软件モデルをエクスターナルシミュレーションモードで実行すると両方のモジュールが展開されます。推定モジュールのみを展開することにより,ターゲットハードウェアのメモリを節約できます。この場合,調整アルゴリズムはターゲットハードウェアではなく仿真金宝app软件ホストコンピューター上で実行されます。そのためには,自動調整器ブロックで[メモリを削減し,タスクオーバーランを回避してください]オプションを使用します。このオプションを選択すると,展開されたアルゴリズムはオプションをオフにした場合の約3分の1のメモリを消費します。
PIDゲインの計算には周波数応答の推定よりもさらに多くの計算負荷がかかります。コントローラーのサンプル時間が高速の場合,ハードウェアによっては1度の実行サイクルでゲインの計算が終了しない場合もあります。したがって,計算能力の限られるハードウェアを使用する場合,このオプションをオンにすると高速なサンプル時間でPIDコントローラーを調整することができます。
また,このオプションを有効にすると,調整実験が終了した時点と新しいPIDゲインが(pid增益)出力端子に到達した時点の間で,複数のサンプリング周期の遅延が発生する可能性があります。ゲインをコントローラーにプッシュする前に,(启动/停止)信号を更新のトリガーとして使用するのではなく,最初に(pid增益)出力端子で変更を確認します。
注意
このオプションを使用する場合,数値ブロックパラメーターが生成コード内でインライン化されるのではなく,調整可能になるようにモデルを構成しなければなりません。調整可能なパラメーターを指定するには,以下を行います。
モデルエディター:[コンフィギュレーションパラメーター]の[コード生成)、[最最化]で,(既定のパラメーター動作)を
[調整可能]に設定します。コマンドライン:
set_param (mdl DefaultParameterBehavior,可调)を使用します。
参考
関連するトピック
你也可以从以下列表中选择一个网站: