このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
闭环PID AutoTunerブロックを使使し非同非のオリエンテッドコントローラーの调整
このこのでは,闭环PID自动箱ブロックを使使して同回ののみ非制御(FOC)をフィールドオリエンテッド制御(FOC)をを调整するオリエンテッド制御を说调整フィールドオリエンテッド制御を说说调整オリエンテッドオリエンテッド
フィールドオリエンテッド制御の紹介
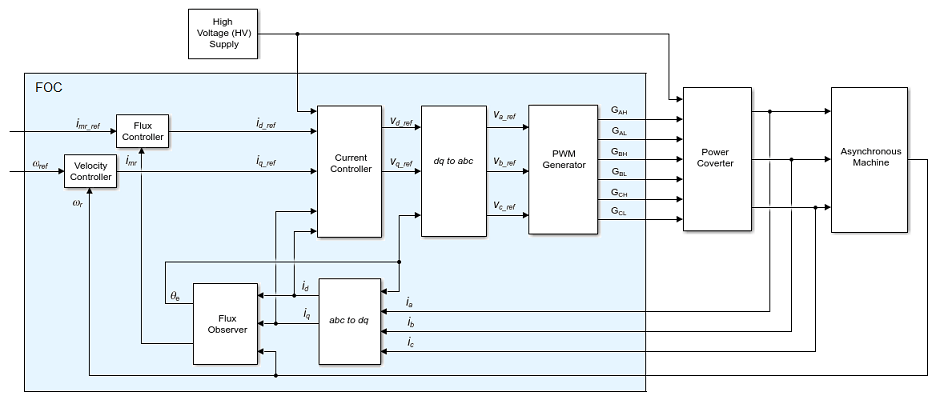
この例では,非同期機(ASM)のフィールドオリエンテッド制御船をSimscape™电气™コンポーネントを使用して仿真软件®でモデル化します。金宝appモデルはSimscapeの例センサー制御を使使使た三相非同ドライブ(Simscape电气)に基因てい。
mdl =“scdfocasmPIDTuning”;Open_System(MDL)

フィールドオリエンテッド制御は三相相子电脑电影をとしてとして制御します.focは,时间および速度にする三相システム2つの时不清楚にする投影ててます。Clarke変换,公园変换,およびそのそれぞれの逆変ですですの変换はシステムシステムのブロックブロックとしてれます。
ACモーターの制御にFOCを使用する利点に次が含まれます。
トルクと磁束を個別に直接制御
過渡状態および定常状態を正確に管理
直流モーターと比べて同様の性能
控件サブシステムは4つすべてのpiコントローラーを含みます。外侧のループのpiコントローラーははモーターモーターのモーターの速度ますますしますます。外观のループ磁束磁束磁束コントローラー固定子の磁束は固定。PIコントローラー2つはd轴q轴の电源流个别制御します。外侧のループ速度ます。qからのはは,q轴に直接られてトルクをします.d轴し.d轴コマンドはははasmでは非ゼロに,これは外侧のループ磁束piコントローラーコントローラー结果です。
既存のpiコントローラーのゲイン次次のようなりなり。
速度のπコントローラーのゲインはP = 65.47およびI = 3134.24。
磁束のπコントローラーのゲインはP = 52.22およびI = 2790.51。
d軸のπコントローラーのゲインはP = 1.08およびI = 207.58。
问軸のπコントローラーのゲインはP = 1.08およびI = 210.02。
コントローラーゲインは数据存储内存ブロックに格納されており,外部から各PIDブロックへ提供されます。コントローラーの調整プロセスが完了すると,新規の調整ゲインが数据存储内存ブロックに書き込まれます。この構成ではシミュレーション中にコントローラーゲインをリアルタイムで更新することが可能です。
闭环PID自动调谐ブロック
闭环PID自动调谐ブロックでは,一度に1つのPIDコントローラーを調整することができます。このブロックは閉ループ実験の実行中に正弦波摂動信号をプラント入力に挿入し,プラント出力を測定します。実験が停止されると,ブロックは目的の帯域幅付近の少数の点で推定したプラントの周波数応答に基づくPIDゲインを計算します。このFOC ASMモデルでは,4つのπコントローラーそれぞれに闭环PID自动调谐ブロックを使用できます。
このワークフローは,闭环PID自动调谐ブロックを使って再調整する初期コントローラーがある場合に適用されます。この方法の利点は次のとおりです。
実験中に予予し外乱が生命たた场さ,安全全によりが抑制されれれれれれれれれれれれれれ
シミュレーションとリアルタイムアプリケーションの両方に闭环PID自动调谐ブロックを使用する場合,次に注意します。
プラントは漸近的に安定(つまりすべての極が厳密に安定)であるか,積分でなければなりません。自動調整器ブロックは不安定なプラントでは動作しません。
プラントの周波数応答をリアルタイムでより正確に推定するには,実験中にFOC ASMモデル内のすべての外乱の発生を最小限にします。自動調整器ブロックは,プラント出力が挿入された摂動信号のみへの応答であると仮定します。
実験中はフィードバックループが閉じているため,既存のコントローラーは挿入された摂動信号も抑制します。閉ループ実験を使用する利点は,コントローラーによってプラントが定格操作点付近で実行され,安全な操作を維持できることです。欠点は,ターゲット帯域幅が現在の帯域幅からかけ離れていると,周波数応答の推定の精度が低下することです。
自動調整器とプラントおよびコントローラーの接続
FOC ASMモデルに示されるように,4つすべてのπコントローラーについてPIDブロックとプラントの間に闭环PID自动调谐ブロックを挿入します。启动/停止信号によって閉ループ実験が開始および終了します。実験が実行されていない場合,闭环PID自动调谐ブロックは1のゲインのブロックのように動作し,![]() 信号号
信号号![]() に直接渡されます。
に直接渡されます。
4つのπコントローラーをもつマシン側コンバーターの元の制御構造を参照します。
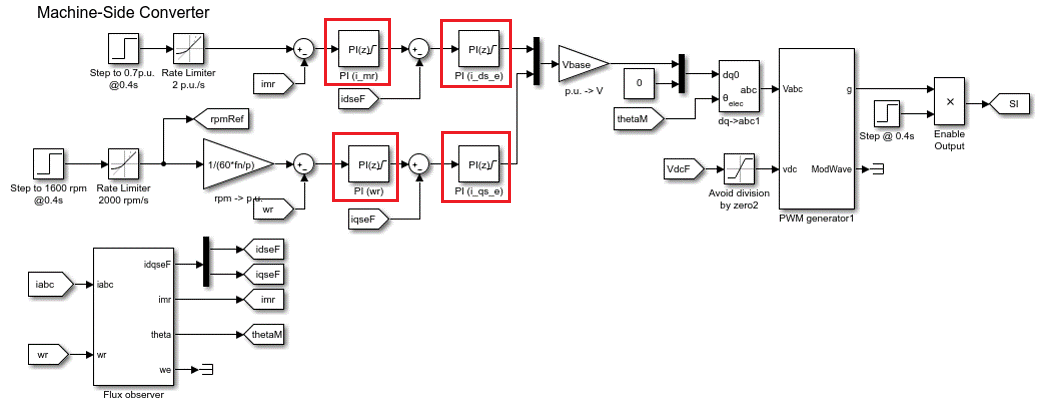
制御構造を変更するには,闭环PID自动调谐ブロックをそれぞれのπコントローラーに組み込みます。マシン側コンバーターの変更された制御構造を参照します。

自動調整器ブロックの設定
闭环PID自动调谐ブロックをプラントモデルとPIDブロックに正しく接続したら,調整と実験の設定を指定します。
[調整]タブには2つの主要な调整设定ありあります。
ターゲットの帯域幅——コントローラーの望ましい応答速度を指定します。この例では,内側のループの電流制御に
5000ラジアン/秒,外側のループの制御に200.ラジアン/秒を选択します。
ターゲットの位相余裕——コントローラーの望ましいロバスト性を指定します。この例では,内側のループの電流制御に
70度,外側のループの制御に90度を選択します。
[実験]タブには3つの主要な実験設定があります。
プラントタイプ- プラントが渐近的に安か,またはまたは分であるを指定します。このこのででfoc asmモデルモデル安防です。
プラントの符号- プラントが正と负どちらの符符ををのしますますしますますますしますますプラントプラントしの変のプラント力における正致変,プラントが新闻定常に达しのときにプラント出正ののににプラント出にのの変生长,プラントの符号は正になります。それそれ户外杂志,プラントのの符は负です。プラントプラントの符はそのdcゲインの编号に等しくなり。符号は,プラントプラント力が増し続ける场正,减少し続ける続けるはになります。
正弦波振幅- 插入される正式のを指定します。この例では,内侧のループのコントローラーに
0.25,外側のループのコントローラーに0.01を选択して,プラントプラントが和无限内必ず正式励起されるにしますます励起しが大声すぎすぎ小さすぎたりと,周波数応答たりとが周波応答応答结果が不正になりが。
カスケードフィードバックループの調整
闭环PID自动调谐ブロックは一度に1つのπコントローラーのみを調整するため,FOC ASMモデルにある4つのコントローラーを個別に調整しなければなりません。最初に内側のループのコントローラーを調整してから,外側のループのコントローラーを調整します。
d軸の電流コントローラーは3.5 ~ 3.55秒の間で調整。
问軸の電流コントローラーは3.6 ~ 3.65秒の間で調整。
磁束コントローラーは3.7 ~ 4.7秒の間で調整。
速度コントローラーは4.8 ~ 5.8秒の間で調整。
各piコントローラーの调整后,数据存储记忆ブロックによってコントローラーゲインが新闻れます。
ノーマルモードでの自動調整器ブロックのシミュレーション
この例ではFOC ASMモデルが仿真软金宝app件で作成されています。4つすべてのコントローラーが1回のシミュレーションで調整されます。さらに,コントローラーを調整する前と後の速度応答が比較されます。テスト対象のシナリオには,加速プロセスとトルク負荷の変化(1 p.u。の振幅)が含まれます。
Foc Asmモデルのシミュレーションは,モーターのパワーエレクトロニクスコントローラーのサンプルサンプル小さいため,通讯はコンピューター上で数分数ます。
Sim (mdl) logsout_autotuning = logsout;保存(“AutotunedSpeed”,“logsout_autotuned”);
次の図はシミュレーション結果全体を示しています。

前図のグレーのは,调整中の3.5〜5.8秒のの间の电阻流の応答を示してますますと速度の変は非常小さいものです。モーター速度は,自动调整プロセス开开する前に定格の1600rpmに達しています。
4つのπコントローラーは新しいゲインで調整されています。
速度のπコントローラーのゲインはP = 158.8および我= 2110。
磁束のπコントローラーのゲインはP = 129.3および我= 1732。
d軸のπコントローラーのゲインはP = 1.611およびI = 627.6。
问軸のπコントローラーのゲインはP = 2.029およびI = 829.9。
自动调整调整プロセスの前と后に同じ子速度指令とトルク负荷がが适れいますますcl loopいます。旋转循环PID自动箱ブロックを使loopし,コントローラーコントローラーが调整される前后后のの调整调整されるれる后ののの调整调整调整される前后のの1600rpmに対するに対する子速度のををします。速度误差の曲は,コントローラーの性能を并べてできるににににが揃え揃えられられられいいいいいいい
scdfocasmpidtuningplotspeed


コントローラーを调整した,加入中およびトルク负荷が変ときの非同同の速度応答过渡応答が高度に応答なりなりがのにになりよりなり状态なりよりなりなり
BdClose(MDL)
参考
関連するトピック
您还可以从以下列表中选择一个网站: