このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
计算机视觉的工具箱入門
计算机视觉工具箱™は,コンピュータービジョン,3次元ビジョン,動画処理システムを設計しテストするためのアルゴリズム,関数およびアプリを提供します。オブジェクトの検出と追跡に加え,特徴の検出,抽出およびマッチングを実行できます。単一カメラ,ステレオカメラ,魚眼カメラのキャリブレーションワークフローを自動化できます。3次元ビジョン向けの機能として,ツールボックスでは,视觉大满贯,点群大满贯,ステレオビジョン,结构与运动,および点群処理をサポートしています。コンピュータービジョンアプリは,グラウンドトゥルースのラベル付けとカメラキャリブレーションのワークフローを自動化します。
YOLO v2,意思SSD, ACFなどの深層学習と機械学習のアルゴリズムにより,カスタムオブジェクト検出器に学習させることができます。セマンティックセグメンテーションとインスタンス セグメンテーションには、U-Net や Mask R-CNN などの深層学習アルゴリズムを利用できます。ツールボックスには、大きすぎてメモリに収まらないイメージの解析に使用できる、オブジェクトの検出およびセグメンテーション用アルゴリズムが用意されています。事前学習済みのモデルを使って、顔、歩行者、その他の一般的なオブジェクトを検出できます。
マルチコアプロセッサやGPUで実行してアルゴリズムを高速化できます。ツールボックスアルゴリズムでは,既存のコード,デスクトッププロトタイピング,組み込みビジョンシステム展開と統合するためにC / c++コード生成がサポートされています。
チュートリアル
- グラウンドトゥルースデータにラベルを付けるためのアプリの選択
グラウンドトゥルースデータのラベル付けに,次のどのアプリを使用するかを決定します。イメージラベラー、ビデオラベラー、グラウンドトゥルースラベラー、激光雷达ラベラー、信号ラベラー、音频贴标签机。
- オブジェクト検出器の選択
オブジェクト検出器の比較
- カメラキャリブレーションとは
イメージまたはビデオカメラのレンズとイメージセンサーのパラメーターを推定します。
- 深層学習を使用したオブジェクト検出入門
深層学習ニューラルネットワークを使用したオブジェクト検出。
- 深層学習を使用したセマンティックセグメンテーション入門
深層学習を使用してクラス別のオブジェクトをセグメント化
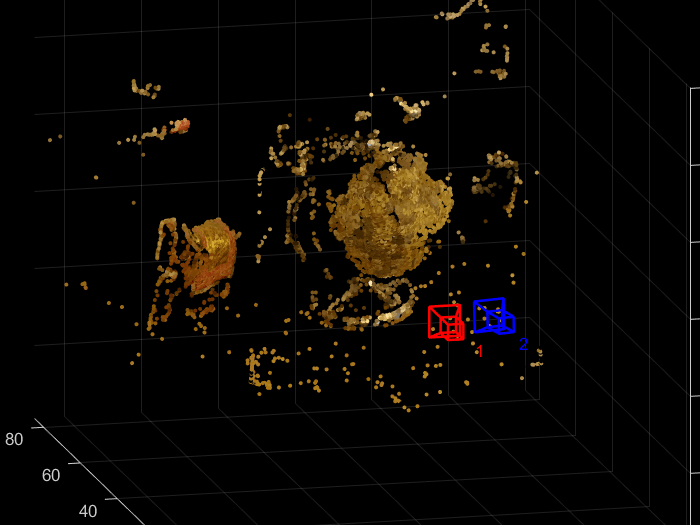
- 深層学習を使用した点群入門
深層学習に点群を使用する方法を理解します。
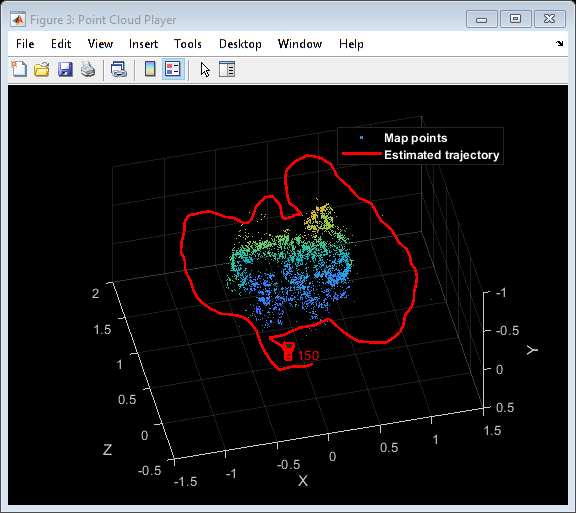
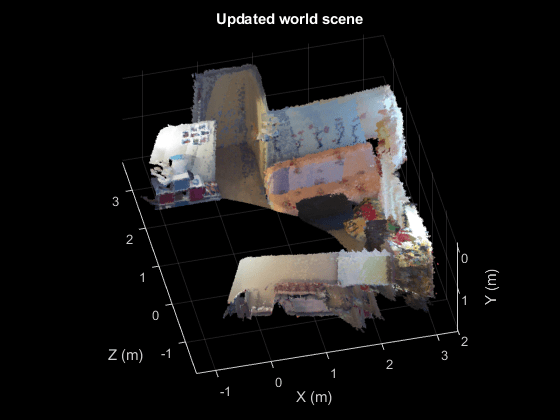
- 点群のレジストレーションとマッピングの概要
点群のレジストレーションワークフローを理解します。
- 局所特徴の検出と抽出
局所特徴の検出と抽出の利点と用途の学習
注目の例


ビデオ

计算机视觉工具箱アプリケーション
コンピュータービジョン,3次元ビジョン,および動画処理システムの設計とテスト

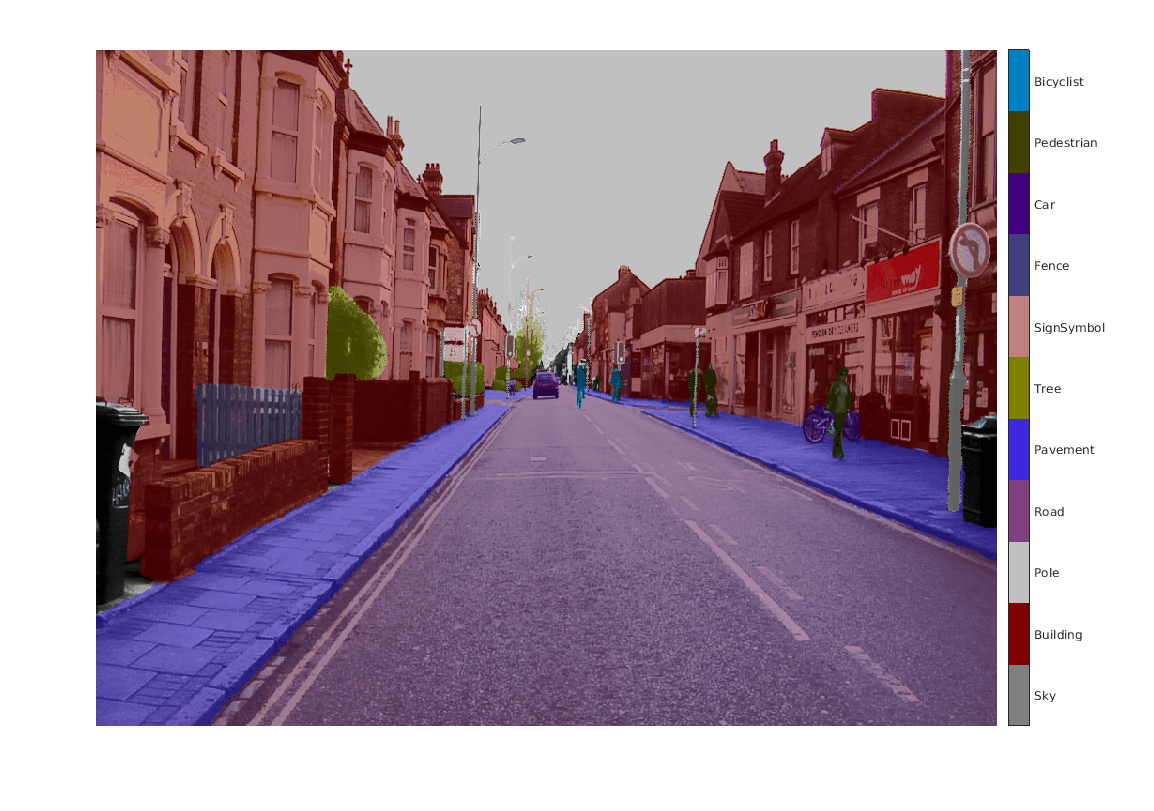
セマンティックセグメンテーション
SegNet、FCN U-Net DeepLab v3 +などのネットワークを使用して個々のピクセルとボクセルを分類することで,イメージと3次元ボリュームをセグメント化する

MATLABでのカメラキャリブレーション
カメラキャリブレーターアプリを使用して,チェッカーボードの検出を自動化し,ピンホールカメラと魚眼カメラのキャリブレーションを行う
你也可以从以下列表中选择一个网站:
