机器人系统工具箱
ロボット工学アプリケーションを設計,シミュレーション,およびテスト
机器人系统工具箱™は,マニピュレーター,モバイルロボット,およびヒューマノイドロボットを設計,シミュレーション,およびテストするツールとアルゴリズムを提供します。マニピュレーター,およびヒューマノイドロボットのため,ツールボックスには衝突検知,軌道生成,順運動学と逆運動学,剛体ツリー表現を使用したダイナミクスのためのアルゴリズムが含まれます。モバイルロボット用には,地図作成,位置推定,パスプランニング,パス追従,およびモーション制御のためのアルゴリズムが含まれます。ツールボックスは,一般的な産業ロボットアプリケーションのリファレンスサンプルを提供します。インポート,可視化,およびシミュレーションできる,商業利用可能な産業ロボットモデルも含まれます。
提供される運動学とダイナミクスのモデルを組み合わせて,実用的なロボットのプロトタイプを開発することができます。ツールボックスでは,露台シミュレーターに直接接続することで,ロボットアプリケーションをコシミュレーションすることができます。ハードウェアで設計を検証するときは,コードを生成してロボットプラットフォームに展開することができます(MATLAB编码器™または金宝app仿真软件编码器™を使用)。
詳細を見る:


リファレンスサンプルで複数の倉庫用ロボットを制御してシミュレート
ロボットモデル
独自のロボットモデルを構築,またはロボットアプリケーションを構築するために,一般的なロボットのライブラリを使用することができます。统一的机器人描述格式(URDF)ファイル,またはSimscape多体™モデルをインポートしてカスタムのロボットモデルとビジュアルジオメトリを作成します。

商業利用可能なロボットのライブラリから剛体ツリーモデルを読み込み
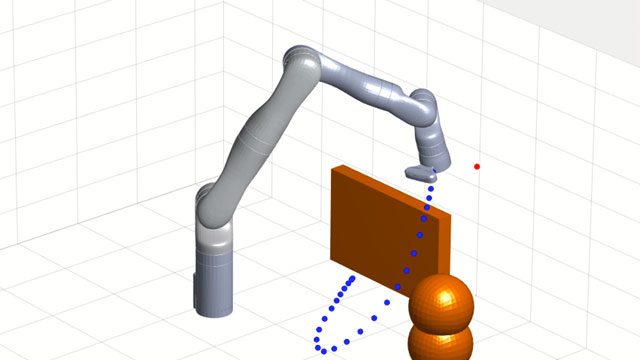
動作のモデリングと制御
モバイルロボットおよびマニピュレーターの基本的な運動学とダイナミクスをモデリングします。ロボット動作を可視化してシミュレーションし,制御アルゴリズムを検証します。
3 dシミュレーション
三维物理シミュレーションとインターフェイスして,現実世界のシミュレーション環境でロボットモデルを検証します。金宝app®モデルのシミュレーションを露台シミュレーションと同期します。

金宝app仿真软件と露台シミュレーターの間でシミュレーションを同期
ロボットハードウェアへの展開
展開されたモデルの信号を参照,またはパラメーターを変更します。ハードウェアでの実行時にアルゴリズムに調整を加えます。

現実の物理ロボットに接続してマニピュレーターアルゴリズムをテスト。
