电机控制Blockset
모터제어알고리즘을설계하고구현할수있습니다。

电机控制Blockset™은브러시리스모터의자속기준제어및기타알고리즘을만들고조정하기위한仿真软件金宝app®블록을제공합니다。 公园및克拉克변환,센서리스관측기,약계자,공간벡터생성기,FOC자동튜너와같은블록이제공됩니다。블록셋에포함된모터및인버터모델을사용하여폐루프시뮬레이션에서제어알고리즘을검증할수있습니다。
블록셋파라미터추정툴은고정자저항,d축및问축유도용량,역기전력,관성및마찰의정확한추정을위해모터하드웨어에서미리정의된테스트를실행합니다。이러한모터파라미터값을폐루프시뮬레이션에사용하여제어기설계를분석할수있습니다。
참조예제를통해데스크탑시뮬레이션에서제어알고리즘을검증하고프로덕션구현에필요한실행률을지원하는간소화된C코드를생성하는방법을볼수있습니다。참조예제를사용하여블록셋에서지원하는모터제어하드웨어키트에알고리즘을구현할수도있습니다。
시작하기:

시뮬레이션및코드생성
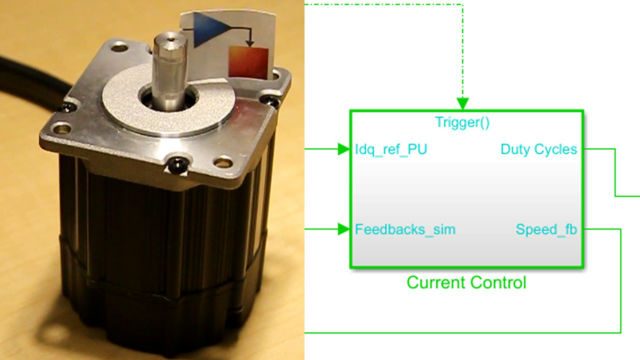
완전히조립된참조예제모델을바탕으로하여표면부착형및매입형永磁同步电动机(영구자기동기모터),유도모터,刷(브러시리스直流모터)에대한자속기준제어알고리즘을설계하고구현할수있습니다。예제모델을사용하여폐루프시뮬레이션에서알고리즘설계를테스트및검증한후,동일한모델을재사용하여임베디드코드를생성및배포할수있습니다。
모터제어키트
참조예제를사용하면빠르고간결한C코드를신속하게생성하여지원되는여러모터제어하드웨어키트에대한모터제어알고리즘을구현할수있습니다。응용프로그램을자동으로빌드하고仿真软件金宝app모델에서타겟마이크로프로세서로직접배포하여모터하드웨어에서알고리즘을테스트할수있습니다。호스트머신에서타겟응용프로그램과통신하고응용프로그램을제어할수있습니다。
제어알고리즘설계
金宝app仿真软件에서公园변환,克拉克변환,π제어기,공간벡터생성기,吨(암페어당최대토크),약계자및유도모터슬립속도추정기블록을사용하여永磁同步电动机및유도모터에대한자속기준제어알고리즘을만들수있습니다。六步变换블록을사용하여刷모터를제어할수있습니다。
코드생성
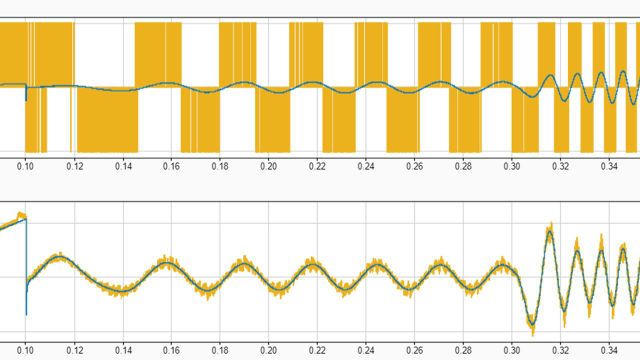
빠르고간결한부동소수점또는고정소수점코드를생성하여임베디드마이크로제어기에구현할수있습니다。(嵌入式编码器사용)실시간실행프로파일링을통해전류루프의성능을평가할수있습니다。

갤러리탐색(이미지2개)
신속제어프로토타이핑
金宝app仿真软件实时및Speedgoat전기모터제어키트를사용하여제어알고리즘을실시간으로테스트할수있습니다。이키트는Speedgoat실시간타겟하드웨어에서아날로그및디지털I / O를통해电动机控制Blockset으로개발한브러시리스直流모터제어알고리즘을실행하고테스트할수있는완전한소프트웨어/하드웨어패키지로이루어져있습니다。

Speedgoat전기모터제어키트。
센서디코더
참조예제를사용하여홀센서및쿼드라쳐인코더의오프셋을보정할수있습니다。그런다음센서디코더블록을사용하여홀센서,쿼드라쳐인코더및리졸버의신호를처리하여회전자의위치와속도를계산할수있습니다。

电机控制Blockset의센서디코더라이브러리。
관측기
滑模观测器블록및通量观察者블록을사용하여센서리스자속기준제어를구현할수있습니다。이들블록을사용하여측정된전압과전류로부터永磁同步电动机및유도모터의회전자전기적위치와기계적속도를계산할수있습니다。자기선속및기계토크를추정하고,임베디드코드를생성하기에앞서시뮬레이션에서관측기파라미터를조정하고관측기작동을검증할수있습니다。

滑模观测器블록을사용한위치및속도추정。
초기제어기조정
모터및인버터파라미터를기준으로속도및전류루프의초기π제어기이득을자동으로계산할수있습니다。함께제공되는스크립트를사용하면전류루프의근궤적,보드다이어그램및계단응답을계산하고플로팅하여전류루프동특성을시간및주파수영역에서분석할수있습니다。(控制系统工具箱사용)

계산된제어기이득을모터하드웨어에서테스트합니다。
자속기준제어자동튜너
定向控制自动调谐블록을사용하여자속기준제어기의속도및전류루프이득을조정함으로써각루프의지정대역폭및위상여유를얻을수있습니다。(金宝app仿真软件控制设计사용)시뮬레이션에서플랜트모델에대해이득을조정할수있습니다。Speedgoat타겟컴퓨터를사용하여모터구동하드웨어에대해이득을실시간으로조정할수도있습니다。(金宝app仿真软件实时사용)
내장된계측화된테스트
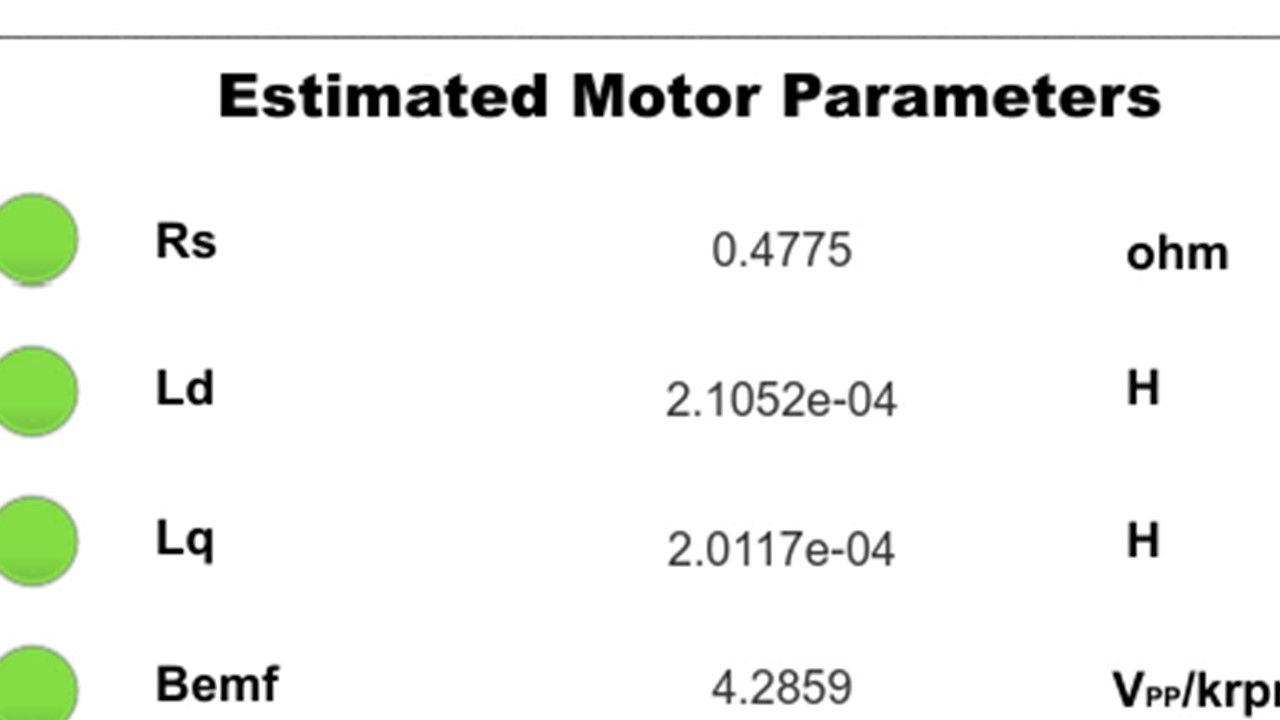
모터에대해미리정의된테스트를실행하는참조예제를사용하여永磁同步电动机모터의고정자저항,d축및问축유도용량,역기전력,관성및마찰파라미터를식별할수있습니다。이러한테스트를위해홀센서및쿼드라쳐인코더또는센서리스관측기를사용할수있습니다。
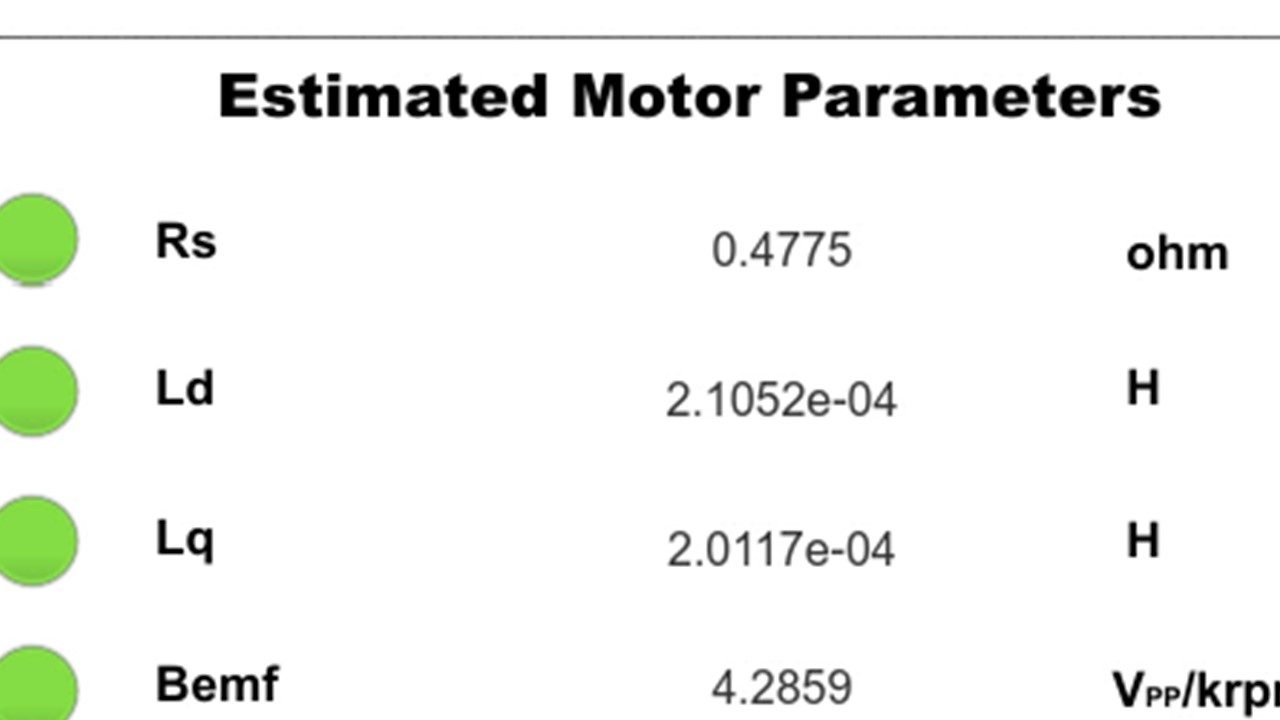
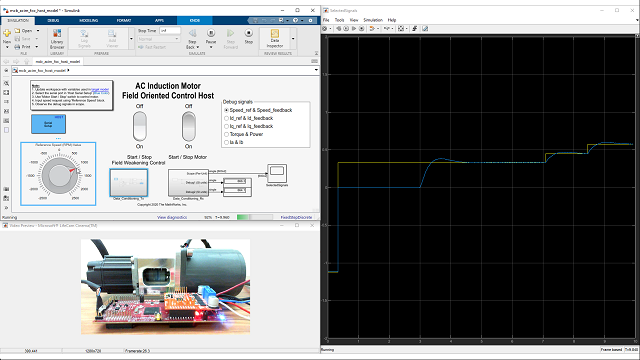
파라미터추정대시보드
호스트컴퓨터에서仿真金宝app软件모델의파라미터추정을시작하고제어할수있습니다。그리고이렇게추정된값을파라미터화된모터모델에저장하여제어기이득을계산할수있습니다。

파라미터추정대시보드。
모터및인버터모델
선형집중파라미터모터모델을구현하는블록을사용하여표면부착형永磁同步电动机및매입형永磁同步电动机과유도모터를모델링하고시뮬레이션할수있습니다。계측테스트에서확인된값으로이러한모델을파라미터화할수있습니다。제어기모델을모터모델과함께제공되는평균값인버터모델과결합하여빠른폐루프시뮬레이션을구성할수있습니다。

永磁同步电动机및인버터모델링。
Simscape电气을사용한고충실도모델링
Simscape电气™을사용하여인버터에서비선형모터동특성과이상적인또는상세한스위칭을모델링및시뮬레이션할수있습니다。비선형성과스위칭효과가적용된시뮬레이션을사용하여고충실도모터및인버터모델에대해자속기준제어알고리즘을테스트할수있습니다。

갤러리탐색(이미지2개)
유도모터
3상유도기계에대한자속기준제어알고리즘설계및구현
유도모터
3상유도기계모델링및시뮬레이션
刷모터
六步变换블록을사용한사다리꼴제어설계및구현
모터파라미터추정
쿼드라쳐인코더또는자속관측기를사용한永磁同步电动机파라미터식별
矢量图블록:
페이저다이어그램에서전류및전압시각화및다양한작동모드에서제어기검증
위기능과관련함수에대한자세한내용은릴리스정보를참조하십시오。
