在这个视频中,我们将一个PID自动调谐器部署到运行在乐高上的嵌入式软件中®头脑风暴®EV3机器人可以自动调整PID控制器的增益,为车轮提供动力以调节其速度。
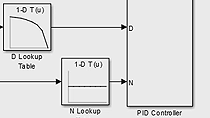
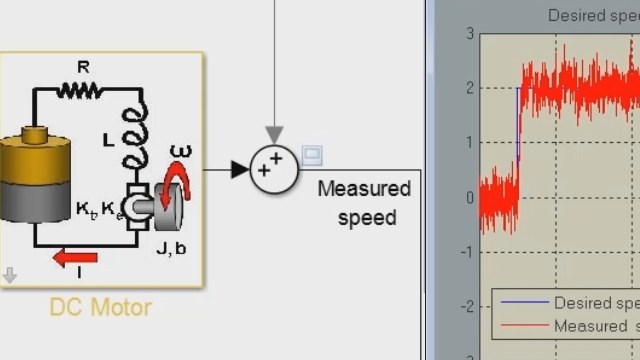
我们使用R2017b版本的Simulink Control Design™中的一种新功能——在线PID金宝app调谐器块来生成PID自整定算法的代码。我们将生成的代码下载到LEGO EV3。我们在LEGO EV3嵌入式软件中初始化PID控制器,以20hz的速度运行,通过初始猜测和参考速度的命令步长变化,以初始增益评估PID控制器的性能。结果表明,系统性能较差,有较大的超调量和振荡。
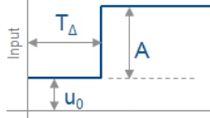
然后我们使用Simuli金宝appnk®运行自动调优算法的外部模式。该算法打开反馈回路,向装置中注入激励信号,测量输出,并使用收集到的数据来估计装置的频率响应。所有这些都是在嵌入式软件中完成的。然后,该算法计算PID增益,用于PID控制器。我们通过要求轮速的一系列步进变化来测试新的增益,以证明改进的控制器性能。