在此演示中,您将看到如何在Simulink中快速调整PID控制器的PID控制器。金宝app
在这种特殊情况下,我们模拟了直流电机。在此块对话框中是定义电机行为的参数:阻尼,惯性,反电动势,电阻和电感。
在他们的块面具上工作,我们看到Simscape和Simutronics块。我们使用模型作为电机。我们将无法设计将控制电机轴的转速的数字控制系统。控制器将在所需速度和测量速度之间计算误差信号,并且它使用我们的信号计算向电机命令的电压请求。
请注意,我们在测量通道中建模传感器噪声,并且因为我们的控制系统是数字的,它们也在模拟A到D转换器是0.02秒的采样时间,在整个块上使用零级。
现在需要添加补偿器。为此,我们进入Simulink库浏览器并创金宝app建子库。将离散PID控制器块加入到我们的模型中。现在让我们将这个块连接到模型的其余部分,并打开块对话框。
这里我们可以指定我们想要使用的控制器类型:PID, PI, PD,比例,或简单的积分。我们将保持在PID。我们可以指定采样时间。在这种情况下,我们将使用我们在A到D转换器中使用的相同的一个。如果你知道PID控制器的增益,我们可以在这里输入。在这种情况下,我们还不知道增益应该是多少,所以让我们应用采样时间的变化,并尝试以默认增益值运行模拟。让我们在我们的范围中添加电压。
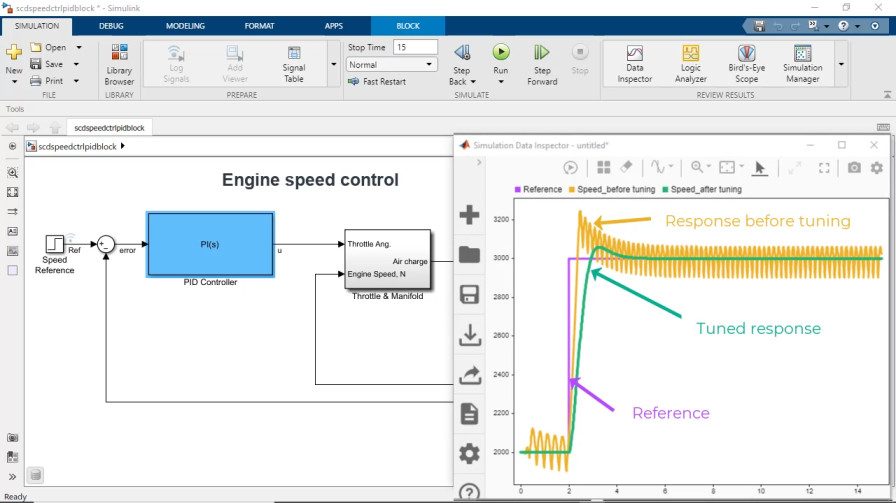
运行模拟,我们看到我们的控制系统并没有做到这一切。蓝线显示所需的速度,红线显示实际测量速度。正如我们所看到的,我们的控制系统不呈现很好。让我们试着改善这种表现。要执行此操作,我们将返回块对话框,然后按TUNE按钮。
这个启动配对调谐器,它线性化计划,计算PID增益,并打开图形用户界面。在图形用户界面中,我们看到两行。虚线表示系统对电流增益值的闭环阶跃响应。实线表示对计算的增益值有相同的响应。
所以让我们简单地接受增益来计算它。当我们这样做的时候,我们看到我们的块参数,PID得到了更新。让我们按下确定,回到我们的模拟,并重新运行它。正如我们所见,我们确实提高了控制系统的性能。它现在跟踪得很好,稳定状态误差为零。它的速度相对较快,超调也相对较小。
如果要提高我们的控制系统的性能,我们可以回到PID调谐器图形用户界面,例如,尝试使过冲一点较低,如果您愿意。或者如果您想要更快的响应,我们可以尝试使用滑块将其移动到右侧,以使系统响应更快。
例如,让我们尝试这个设计。我们现在回到我们的模型,我们用这种设计进行模拟。我们看到我们确实得到了更快的回应,但在广阔的噪音和更高的电压请求信号中,所以我们可能牺牲了执行器的生活,以实现更快的反应。
现在,这是一个你可以作为工程师来决定的权衡,但你现在有了这个工具,可以让它为在Simulink中建模的计划快速设计和调整PID控制器。金宝app演示到此结束。