金宝appSimulink控制设计
모델을선형화하고제어시스템을설계할수있습니다。
金宝appSimulink Control Design™을통해simulink®에서 모델링한 제어 시스템을 설계하고 분석할 수 있습니다. PID제어기를 포함하여, 임의의 西索및 多输入多输出제어 아키텍처를 자동으로 조정할 수 있습니다. PID자동 조정을 임베디드 소프트웨어에 배포하여 PID이득을 실시간으로 자동 계산할 수 있습니다.
金宝app金宝appSimulink Control Design은모델을수정하지않고도이션기반기반의의주파수응답계산할수있는툴을제공
시작하기:

모델기반pid조정
PID조정기 앱을 사용하면 模金宝app拟모델을 자동으로 선형화하고 클릭 한 번으로 PID控制器블록의 이득을 계산할 수 있습니다. 설계 요구사항에 맞춰 대역폭(응답 속도)과 위상 여유(강인성)를 조정함으로써 제어기 성능을 대화형 방식으로 미세 조정할 수 있습니다.

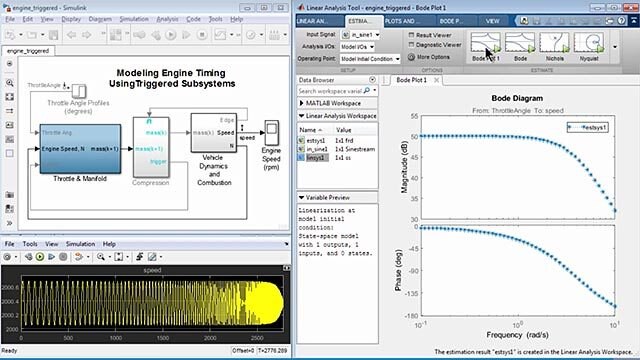
시뮬레이션 데이터에서 플랜트 동특성 추정
PWM(펄스폭변조)같은불연속성으로인해선형화않는simulink모델金宝app의경우,시스템식별을사용하여(系统识别工具箱™필요) PID조정기 앱에서 시뮬레이션 입력-출력 데이터로부터 선형 플랜트 모델을 만들 수 있습니다. 아니면 플랜트 모델의 추정된 주파수 응답에 따라 PID제어기 이득을 자동으로 조정할 수도 있습니다.

실시간 PID자동 조정
하드웨어실험에서추정한플랜트주파수을기반으로闭环pid自动箱블록을사용하여pid이득을을실시간으로자동조정수수수c코드를생성하여조정을임베디드임베디드소프트웨어구현할수수있습니다수있습니다있습니다있습니다있습니다있습니다。金宝appsimulink를루프에넣지플랜트하드웨어에서실시간실험하고하고pid제어기이득을을자동으로계산계산할수수(金宝appSimulink Coder™필요)

대화형방식설계
增益,传递函数,状态空间,PID控制器및 기타 조정 가능한 블록을 사용하여 模拟모델에서 임의의 제어 구조를 모델링할 수 있습니다. 근궤적金宝app 플롯, 보드 다이어그램, 니콜스 차트를 사용하여 이산 루프 또는 연속 루프를 그래픽 방식으로 조정할 수 있습니다. 조정된 이득으로 模拟모델을 업데이트하고 시뮬레이션을 통해 설계를 검증할 수 있습니다.

멀티루프설계
여러siso루프를사용하여하여제어기를대화형방식으로조정하고하고모델모델金宝app을수정하지않고도개방을을지정할수

멀티루프 제어기를 위한 보드 설계
西索및 多输入多输出루프
제어시스템조정기앱또는명령줄를사용하여의siso및mimo제어구조자동자동으로할수수수수이득,PID제어기또는저차원필터등가능능간단한요소들사용하여하여분산제어아키텍처들조정할수수金宝appSimulink銇銇銇銇銇銇銇銇銇銇銇銇銇銇銇銇銈尾

시간및주파수영역목표
기준 추종 목표, 민감도 목표, 외란 제거, 폐루프 극점 위치, 안정성 여유 등 조정 요구사항을 지정하고 시각화할 수 있습니다. 제어기 파라미터를 자동으로 조정하여 필수 요구사항(설계 제약 조건)을 충족하고 나머지 요구사항(목표)들도 최대한 충족할 수 있습니다.

다양한 플랜트 모델에 대해 조정
여러여러,파라미터파라미터,결함조건에대해대해모델들플金宝app랜트플랜트모델를만들수수있습니다수수수있습니다수있습니다있습니다。그런그런제어시스템을하여이모든플랜트모델의성능목표를할수있습니다。

파라미터파라미터변형으로선형선형플랜트모델
선형 분석
연속,이산,멀티레이트 金宝app模拟모델을 선형화할 수 있습니다. 선형 분석 툴 또는 명령줄 함수를 사용하여 루프 개방 및 선형화 입력 및 출력을 지정할 수 있습니다. 모델의 전체, 일부 또는 단일 블록이나 서브시스템을 선형화할 수 있습니다. 결과를 계단 응답 플롯이나 보드 다이어그램으로 시각화하고 개루프 응답과 폐루프 응답을 계산할 수 있습니다.

여러여러동작점및파라미터파라미터변형에선형선형
모델에대한대한여러선형선형를추출하고분석분석할수수다양한파라미터값,동작점동작점i / o세트를사용하고,lpv(선형선형가변)모델모델구현할수。

线性化顾问
线性化顾问를 사용하여 흔히 발생하는 선형화 관련 문제를 식별하고 해결할 수 있습니다. 선형화 경로에 있는 블록을 찾고, 0으로 선형화된 블록과 같이 특정 선형화 동작을 갖는 블록을 분리할 수 있습니다.

线性化顾问로 선형화 문제를 진단합니다.
오프라인 주파수 응답 추정
선형분석툴이나명령줄함수를사용하여,모델을수정하지않고도simulink에金宝app서에서모델링한시스템의주파수을추정할수수의주파수을을추정수수다음과다음과같은작업을을수행할수수
- 用户사인스윕스윕또는처프신호와가진신호신호。
- 시뮬레이션 실행, 데이터 수집, 모델의 주파수 응답 계산 및 플로팅.
- 주파수영역특성특성사및simu金宝applink모델모델의선형화화

온라인주파수응답추정
구동 중인 시스템의 주파수 응답을 측정할 수 있습니다. 물리적 플랜트의 실시간 추정을 위해 임베디드 추정 알고리즘을 독립형 응용 프로그램으로 배포할 수 있습니다.

频率响应估计器블록
모수적모델
金宝appsimulink모델의계산된주파수응답系统识别工具箱를사용하여선형모수적을계산할수있습니다。

金宝app模拟모델의 주파수 응답으로부터 모수적 모델을 생성합니다.
극값탐색제어
极值搜索控制器블록을 이용한 모델 없는 실시간 최적화를 통해 제어 시스템 파라미터를 자동으로 조정하여 목적 함수를 극대화할 수 있습니다. 적응 순항 제어, 태양광 배열의 最大功率点(최대전력점추적), 防抱死制动系统(잠금 방지 제동 시스템) 및 기타 응용 분야에 극값 탐색 제어를 활용할 수 있습니다.

防抱死制动系统(잠금 방지 제동 시스템)를 위한 극값 탐색 제어
제약 조건 적용
强制执行블록을 사용하여 제약 조건 및 작동 범위를 충족할 수 있도록 제어 동작을 수정할 수 있습니다. 자율 주행, 로봇공학, 기타 응용 분야에서 모델 예측 제어, 강화 학습, PID제어가 구현된 제어 시스템에 제약 조건을 적용할 수 있습니다.

일괄 선형화 및 자르기
여러 동작 조건에서 金宝app模拟모델들을 자동으로 자르고 선형화할 수 있습니다.

이득 곡면 조정
变化的PID控制器,不同的传递函数,不同的陷波滤波器,不同的低通滤波器등의simulink블록을사용하여이득스케줄링제어시스템을모델링수있습니다。金宝app이득곡면계수자동으로하여시스템요구요구에에하고동작점간에매끄러운천천동작점간매끄러운에동작조건에따라달라지는요구사항을을지정하고설계전체작동범위에대해조정결과검증할수수

조정을 위한 이득 곡면 추정.
정상상태해석
사용자 정의 사양에서 동작점을 계산할 수 있습니다. 사용자 지정 제약 조건과 자르기 목표를 정의할 수 있습니다. 시뮬레이션 중 특정 시각 또는 이벤트에서의 동작점 스냅샷을 찍을 수도 있습니다.

조정을 위한 이득 곡면 추정.
稳态经理
稳态经理앱을사용하여상태,입력,출력사양으로부터대화형대화형으로동작점을을할수수수수사양과의하여동작점을검증하고시뮬레이션스냅샷스냅샷대화형방식으로을구할수있습니다。

모델초기화
계산된동작점으로모델초기화하여정상조건또는이션스냅샷스냅샷시뮬레이션을을시작할수수테스트할시나리오의시작에서에서이션을을할수있습니다。

동작점에서 모델을 초기화합니다.
