使用MATLAB和Arduino的电机控制
马杜戈文达拉扬,MathWorks公司
这动手教程演示了如何从MATLAB命令®金宝app支持包的Arduino®可用于控制DC,步进,和伺服电机。我们使用Adafruit的汽车盾V2和Arduino的因与MATLAB和步通过一系列MATLAB命令来显示实际这些电机。
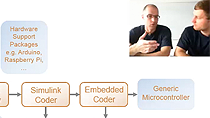
在这个演示中,我们将看到如何使用MATLAB的Arduino支持包控制电机。金宝app软件方面,我的机器上预装了MATLAB和MATLAB Support Pack金宝appage For Arduino。如果您没有安装支持包,您可以到附加项选项卡,并金宝app单击获取硬件支持包下载和安装支持包。硬件方面,我有Arduino Due, Arduino的Motor Party Pack, DC Battery Pack和USB Micro-b Cable。
要跟随这个演示,并使连接,我有,连接伺服1引脚在电机屏蔽伺服电机。直流电机1脚,步进电机M3、M4脚。重要的是要注意,直流电池组是必要的,以控制直流电机和步进电机。将直流电池包连接到电源引脚上。线缆的Micro-b端需要连接到Due上的编程端口,USB端连接到安装了MATLAB的PC上。更多关于如何连接的详细说明,请点击这个链接。
现在我们已经建立了所有必要的连接,让我们进入MATLAB,看看如何控制电机。为此,我写了一个剧本,我将展示给大家看。这个脚本中的Arduino函数建立了与Due的连接,Due在第一个输入中提到的com端口上断开了连接。这个函数还向MATLAB提供了关于需要包含在Arduino服务器代码中的库的说明。当我在MATLAB命令窗口中执行此操作时,MATLAB创建一个对象,该对象表示它所连接的物理对象。
然后,附加功能已创建连接到电机盾对象进行操作。执行在命令窗口中的命令和运行MATLAB脚本有同样的效果。所以在这个视频的其余部分,我将使用按钮转到代码的下一节执行当前部分之后。
MATLAB在工作区中创建一个新对象每次连接到一个新的物理对象的时间。在这种情况下,电机盾。在这里,在代码中,伺服和正确的位置功能的这一部分是我们需要关注的人。伺服功能可用于从MATLAB通信到连接在第二输入所提到的端口号的伺服电机。正确的位置功能,您可以命令伺服电机移动到所提到的位置。在这里,我使用的是4循环到发动机,从0度到180度的五倍移动,来回。我在这里连接车轮的图像伺服电机来显示它在行动。
在电线的下一个部分,步进功能可以帮助我们建立在端口2连接第三个输入到该函数指定的步骤的步进电机必须采取一切革命的数量步进电机的连接。移动功能命令步进电机来移动的,其在第二输入提到的步骤的数量。让我们来看看MATLAB可以使芭蕾舞演员舞蹈的音乐。
为了与过去的类型的电机与来自MATLAB的摩托党包走来沟通,可以使用直流电机的功能。停止和启动评论不正是顾名思义。请记住,被提到的电机的速度后这些功能只能使用。电机的速度必须被提及为用于电机的最大速度的百分比值。这里的催眠盘显示了直流电机的工作。
就这样,我们已经看到了如何控制使用MATLAB和支持包Arduino的马达。金宝app
产品焦点
其他资源
相关视频和网络研讨会
















您还可以从以下列表中选择一个网站: