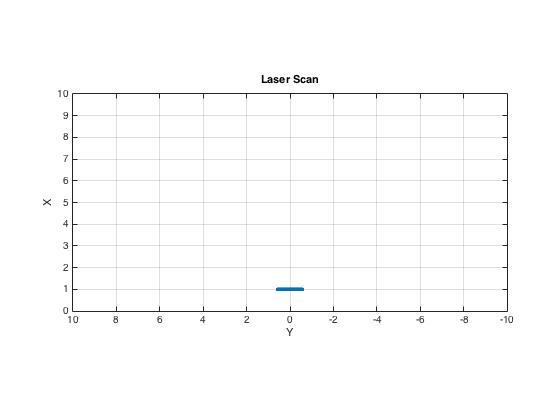
命令肯定看起来正确。您是否尝试将最大扫描范围更改为非默认值?例如:
绘图(扫描,'minimumerrange',10);
另外,在移动/旋转机器人时会发生什么?情节改变或保持不变吗?
- 塞巴斯蒂安


