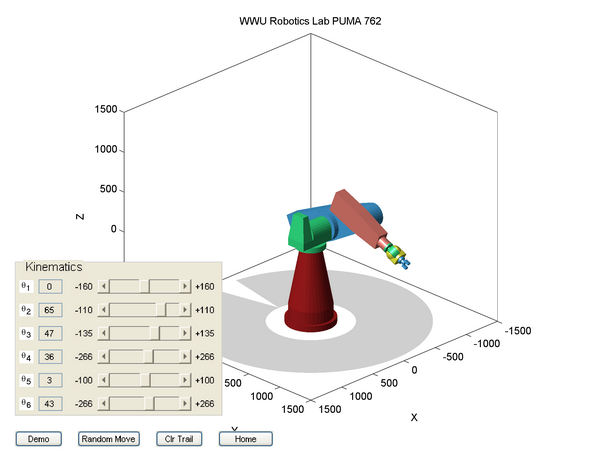
该计划在Walla Walla College仿真在机器人实验室中的6个链接3D Puma机器人。由于CAD2MATDEMO程序,3D机器人看起来“真实”。
机器人目前使用使用直接输入和滑块(GUI)的直接输入来移动运动控制。一些反向运动学选项内置但未自动化(演示按钮)。还提供随机输入,并且机器人在位置之间有动画。
只需两个文件即可使用。主程序和六个3D链接在启动时读取的数据文件。
尝试“Demo”按钮和“随机移动”按钮。
注意:将更新和改进此文件。评论欢迎。
引用
唐莱西(2021)。3D puma机器人演示(//www.tatmou.com/matlabcentral/fileexchange/14932-3d-puma-robot-demo),Matlab中央文件兑换。检索到。
Matlab释放兼容性
用R2006B创建
兼容任何版本