
这个程序被开发为基于Web的控制系统的一部分教程,请访问:http://ctms.engin.umich.edu
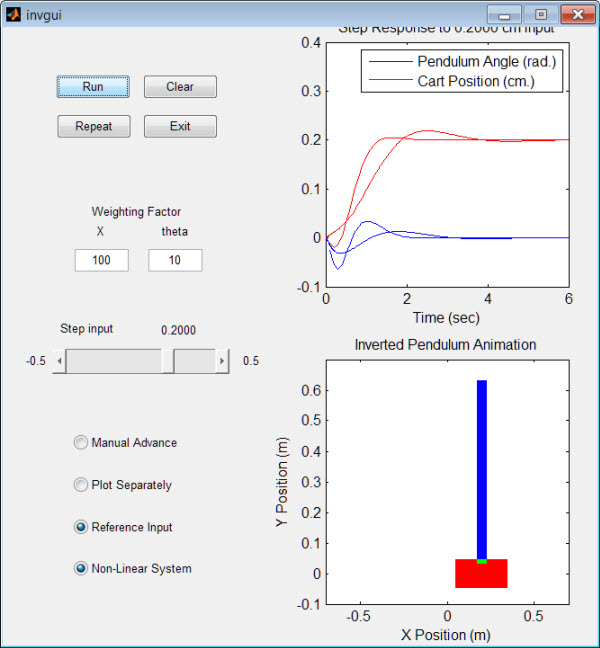
这个程序的目的是让用户查看倒立摆系统的动画与阶跃响应曲线。这允许用户看到的情节和系统的物理反应之间的相关性。
动画和应用程序是基于倒立摆 - 教程的状态空间控制器的设计页面:
http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace
被使用的状态反馈的方法,因为我们可以很容易地返回车位置和摆角的以及它们各自的速度。有关系统模型的更多信息,请参阅倒立摆 - 教程的系统建模页:
http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=SystemModeling
引用作为
里克·希尔(2020年)。倒立摆控制(//www.tatmou.com/matlabcentral/fileexchange/40801-inverted-pendulum-control),MATLAB中央文件交换。检索。
评论和评分(8)
MATLAB版本兼容性
创建与R2012b
与任何版本兼容
平台兼容性
视窗 苹果系统 Linux的标签
您还可以选择从下面的列表中的网站:
马尔钦Rybacki(查看资料)
穆赫辛·阿里(查看资料)
阿明TA(查看资料)
添加=> “警告( 'OFF', 'MATLAB:HG:EraseModeIgnored');”在invgui.m文件“MATLAB \加载项\ APPS \ InvertedPendulumControl \码”,以停止警告有关“的EraseMode属性不再支持”金宝app
哈里什库普帕姆(查看资料)
马赫迪A. A. ELHAG(查看资料)
阿贾伊DUSA(查看资料)
亲爱的先生,
我使用Matlab.I看到您的文章控制倒立摆的一个项目就it.It只是great.But当我尝试运行GUI的动画代码它显示了我的错误
???功能varargout = inv_pend_ani(varargin)
|
错误:函数定义不是在这方面允许的。
为输出图形工作只是fine.Only我的代码在你的GUI动画有一个问题
基督教加利西亚(查看资料)
ANKUR sarmah(查看资料)