Stateflow滑模控制器(高级)
描述:这个软件被选为“本周文件交换选择”——看:“https://blogs.mathworks.com/pick/2017/08/18/stateflow-sliding-mode-controller-demo/”。它是由兹比格涅夫•Mrozek博士(波兰克拉科夫大学)合作教授Stanisław Tarasiewicz(加拿大拉瓦尔大学)。与年长的贡献”Stateflow滑模控制器演示“用户更多的控制为双曲不稳定和不稳定oscilator轨迹设定初始条件,以及开关线的斜率和最后的情节。
会议论文”尝试滑模控制器来移动机器人弧焊过程”由z . Mrozek和s . Tarasiewicz alghoritms使用描述包含在下载文件中。
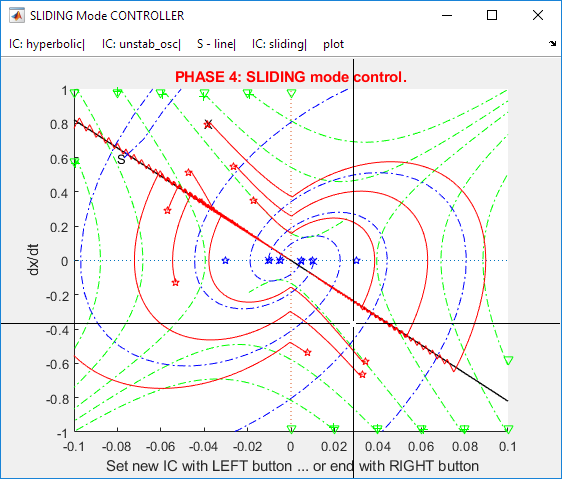
这个软件的目的是演示非线性滑模控制器的设计来控制运动平台的移动机器人焊接设备。滑模控制器的主要特点是快速响应和沉降时间短。控制器不使用稳定反馈但寻找快速稳定的轨迹产生目标点附近和交换机之间找到更好的轨迹。书中描述的方法是:滑动模式控制和优化教授瓦迪姆Utkin,施普林格1 - 1992,ISBN: 978-3-642-84381-5(印刷)978-3-642-84381-5(在线),在通信和控制工程系列中,1992年出版
这个例子是书中描述“我MATLAB仿真软件。金宝appPoradnik użytkownika。Wydanie IV,氦核2017年,波兰ISBN 978-83-246-5621-9,https://helion.pl/ksiazki/matsi4或英文https://uk.mathworks.com/academia/books/matlab-i-金宝appsimulink-mrozek.html?s_tid=srchtitle
引用作为
Bogumila &兹比格涅夫•MROZEK (2023)。Stateflow滑模控制器(高级)(//www.tatmou.com/matlabcentral/fileexchange/64611-stateflow-sliding-mode-controller-advanced), MATLAB中央文件交换。检索。