 克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上
克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上 洛伦(Matlab)的艺术
洛伦(Matlab)的艺术 史蒂夫(Steve)与MATLAB进行图像处理
史蒂夫(Steve)与MATLAB进行图像处理 家伙在simu金宝applink上
家伙在simu金宝applink上 深度学习
深度学习 开发人员区
开发人员区 Stuart的MATLAB视频
Stuart的MATLAB视频 头条新闻
头条新闻 档案交换一周
档案交换一周 汉斯在物联网上
汉斯在物联网上 学生休息室
学生休息室 初创企业,加速器和企业家
初创企业,加速器和企业家 MATLAB社区
MATLAB社区 matlabユーザーコミュニティー
matlabユーザーコミュニティー状态流滑动模式控制器演示
将要本周的选择是状态流滑动模式控制器演示经过Bogumila和Zbigniew Mrozek。
我总是喜欢以Simulink和stateFlow建模的良好控制问题。金宝appMrozek博士的提交提供了模拟“带有焊接设备的平台移动机器人”的模拟。他们将机器人的动力学建模为线性时间不变系统。您可以看到它由Simulink模型中标记为“ LTI系统”的块表示。金宝app
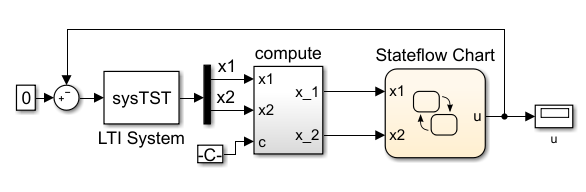
右边是标有“状态流图”的块。这是向机器人提供输入的控制器。如果我们打开图表的细节,我们会观察到有两种控制模式:振荡和双曲线。两者都是比例控制,但它们依靠不同的增益常数(那些以u方程中“ k”开头的变量)。

提交包括一个MATLAB脚本,该脚本定义了模拟使用的各种参数。然后,该脚本为机器人和不同控制模式的不同初始条件执行模拟。有效地,我们研究机器人给出特定初始速度和静止位置的初始位移时会发生什么。
最终结果是一个相当令人满意的图,它显示机器人在X轴上的位置以及Y轴上的速度。给定线上的每个点对应于模拟中特定时刻的机器人的位置和速度。绿色轨迹是双曲线的,并且很快变得不稳定。蓝色轨迹是振荡性的不稳定模拟,旋转并远离坐标系的原点。红色轨迹来自滑动模式的运行,该控制策略提供了“快速响应和短时间安装时间”。

虽然很棒,但总有改进的余地。我有一些想法,可以使开发人员和最终用户更容易练习。
- 尽管与此提交相关的教科书可能有解释,但该脚本本身几乎没有洞察线性时间不变系统的推导。一个现场编辑脚本可用于记录方法。
- 更好的是,为什么有SIMSCAPE多体?您可以这样更清晰,准确地对机器人及其平台进行建模。然后,您可以依靠Simulink控制设计金宝app线性化植物模型关于任何操作点。
- 在此模型中,状态流图在某种程度上是不必要的。据我所知,在SIM的持续时间内,控制器保留在两种模式之一中。可以使用简单的开关块或对运行脚本的一些修改。
- 金宝appSimulink仪表板块对于有兴趣尝试不同测试用例的任何人而不诉诸脚本的人,将有助于使模型更加互动。
- 最后,脚本本身将被大大简化SimulationInput对象。
|
- 类别:
- 选择


也可以看看
-

机器人操纵器的轨迹计划
博客
-
受现实生活启发的模型
博客





注释
要发表评论,请单击这里登录您的数学帐户或创建一个新帐户。