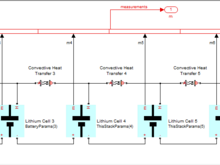
锂离子电池特性、状态估计、电池平衡和热管理
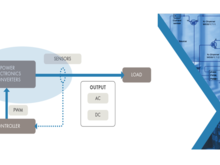
电池充放电控制在一个涉及直流母线、电池、公共负载和双向DC-DC变换器的案例研究中实现。
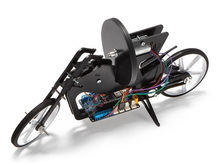
MATLAB和SIMU金宝appLINK文件以编程绘图机器人,网络摄像头控制的流动站,以及来自AEK REV 2的自平衡摩托车项目。
为汽车系统开发AutoSAR软件组件。
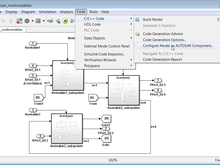
生成针对Cortex-M处理器优化的代码。

这些文件伴随着Matlab,第5版的文本控制和估算

使用Simulink自动编程VEX EDR V5机器人大脑金宝app

生成针对STM32发现板优化的代码

为Zynq-7000 SoC的ARM部分生成代码。

本课程介绍建模与仿真(8章,90多个模型和脚本)MATLAB、SImulink、SImscape、Stateflow金宝app

刚性系统的一阶梯度下降算法。

了解如何创建和运行实时虚拟车辆和驾驶员在环模拟器,以安全地测试和验证您的新设计。

为Zynq-7000 SoC的FPGA部分生成代码。
在Xilinx fpga和Zynq soc上调试和测试HDL代码。

为BeagleBone Black生成优化的代码。
为Xilinx开发板生成HDL代码。

在英特尔FPGA和SoC FPGA上调试和测试HDL代码



微软的项目Bonsai是一项新的机器教学服务,使工程师能够轻松地向物理系统添加智能控制。
非负矩阵的UD和LD分解及相关的卡尔曼滤波器实现。
为Altera开发板生成HDL代码。

与飞行球和箍模型相关的文件,我们在布拉格的费用CTU开发。
我们为Wolfspeed evaluation逆变器CRD300DA12E-XM3开发了一个包括永磁同步电机机器控制的软件。

MATLAB的水和蒸汽特性及其衍生物

MATLAB的工具箱,用于解决连续时间轨迹优化问题
此包代表了免费的MATLAB安装程序加载项,无需成本,基于模型的设计工具箱。
为MATLAB的FOMCON工具箱

SISO和MIMO系统的主动扰动控制(ADRC)模拟器。实施例。
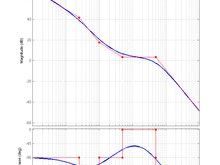
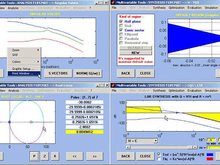
带渐近线的Bode图
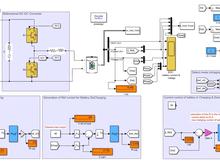
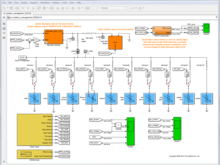
使用Simulink,Simscape和StateFlow的DCDC转换器的模型设计金宝app

一种用于生成分段线性渐近波德图的工具。

这个包中包含了制造能够在道路和走廊上行走的移动机器人所需的文件
金宝app用于模拟和分析热力学系统的模拟工具箱,例如燃气轮机

这是一个平均AC-DC VSC。额定值可以更改,P/V和Q设置可以调整。

使用MathWorks工具的DO-178案例研究

计算连续时间SISO LTI系统脉冲响应的L1范数

在42秒内打破了WomTube上的youtube视频的模拟,这是在42秒内横穿0-400-0的
这段代码是为约束优化问题而设计的。
汽车电气系统仿真和控制:传统车辆电气系统模型,交流发电机,电池,负载和IDL

使用V / F控制方法的感应电动机闭环速度控制

有关MATLAB和Simulink以及机器人操作系统(ROS)入门的资源。金宝app

阿波罗登月舱模型

用于模拟常量、变量分数阶和变量类型及分数阶导数的工具包。


MATLAB在重复控制器项目中的应用。

一种用于控制单相感应电动机(SPIM)转子速度的二阶滑动模式超捻算法。
无人水面飞行器自适应滑模控制的实现

这是一个非线性系统的滑模控制实例的仿真

在控制FOPDT系统时,用于自动计算LADRC参数和评估其性能的调谐应用程序。
基于扩展卡尔曼滤波的带控制的在线系统辨识与去噪
卡尔曼基于在线系统识别和脱结控制

一种双连杆机械手动力学模型预测控制方法。

在J.A.Laghari博士开发的MatlabSimulink软件中使用PID调谐器调整PI金宝appD控制器

用频率响应的对数尺度实部和虚部完成奈奎斯特图。虚极点得到有效处理。

此文件表示球形机器人Norma的动力学。请参阅https://arxiv.org/pdf/1908.02243 欲知详情

此工具箱包含YouTube系列上使用的所有文件。