SLAM(同步定位和映射)是一种用于自动驾驶车辆的方法,它可以让您同时在地图中构建地图并对您的车辆进行本地化。SLAM算法允许车辆绘制出未知环境。工程师使用地图信息来执行诸如路径规划和避障等任务。
SLAM是多年来技术研究的主题。但随着计算机处理速度的巨大进步和低成本传感器(如相机和激光测距仪)的可用性,SLAM现在在越来越多的领域中被用于实际应用。
为了理解SLAM的重要性,让我们看看它的一些好处和应用示例。
大满贯的例子
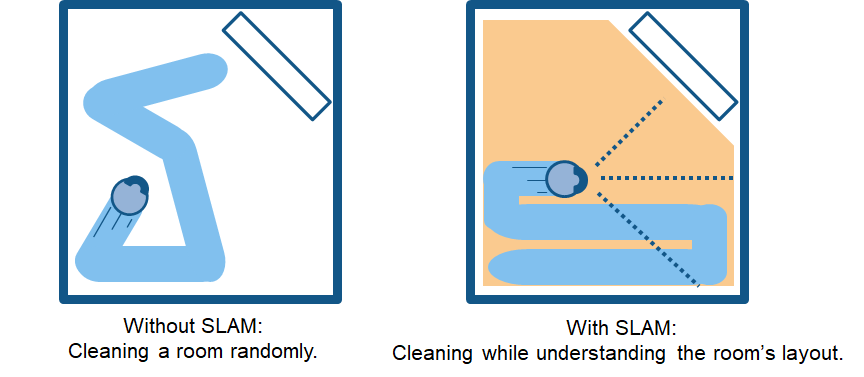
考虑家用机器人吸尘器。如果没有SLAM,它只会在房间内随机移动,可能无法清洁整个地板表面。此外,这种方法使用过多的电力,所以电池会更快地耗尽。另一方面,具有SLAM的机器人可以使用诸如车轮转数和来自相机和其他成像传感器的数据等信息来确定所需的活动量。这叫做本地化。机器人还可以同时使用摄像头和其他传感器来创建周围障碍物的地图,避免对同一区域进行两次清洁。这叫做映射。
SLAM对清洁机器人的好处
SLAM在许多其他应用中都很有用,比如导航一群移动机器人在仓库中布置货架,将自动驾驶汽车停在空地上,或者在未知环境中通过导航无人机递送包裹。MATLAB和Simu金宝applink提供SLAM算法、函数和分析工具开发各种应用程序。您可以实现同步定位和映射以及其他任务,如传感器融合,对象跟踪,路径规划而且路径跟踪.
一般来说,用于实现SLAM的技术组件有两种类型。第一类是传感器信号处理,包括前端处理,这在很大程度上取决于所使用的传感器。第二种是姿态图优化,包括后端处理,这与传感器无关。
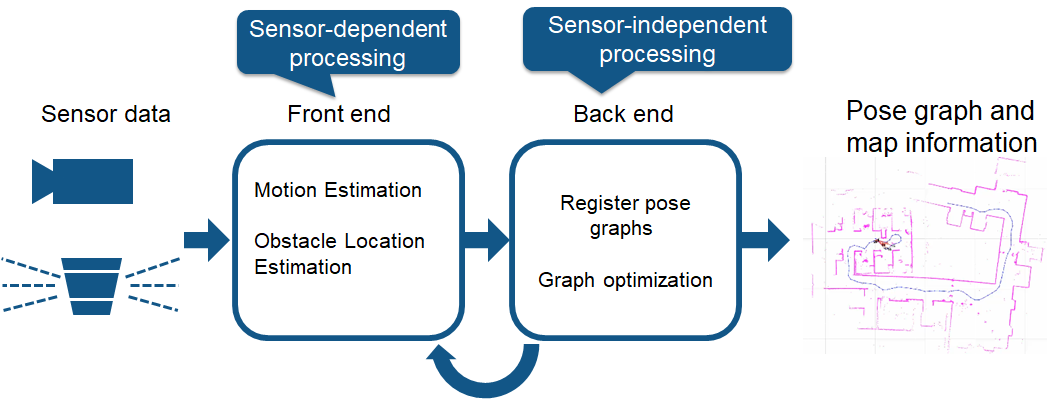
SLAM处理流程
为了进一步了解前端处理组件,让我们来看看视觉SLAM和激光雷达SLAM——SLAM的两种不同方法。
视觉大满贯
顾名思义,视觉SLAM(或vSLAM)使用从相机和其他图像传感器获取的图像。Visual SLAM可以使用简单相机(广角相机、鱼眼相机和球面相机)、复眼相机(立体相机和多相机)和RGB-D相机(深度相机和ToF相机)。
视觉SLAM可以用相对便宜的摄像机以较低的成本实现。此外,由于相机提供大量的信息,它们可以用来检测地标(先前测量的位置)。地标检测还可以与基于图的优化相结合,实现SLAM实现的灵活性。
单目SLAM是vSLAM使用单个摄像机作为唯一的传感器,这使得定义深度具有挑战性。这可以通过检测AR标记、棋盘或图像中的其他已知物体进行定位,或者通过将相机信息与其他传感器(如惯性测量单元(imu))融合来解决,后者可以测量速度和方向等物理量。与vSLAM相关的技术包括运动结构(SfM)、视觉测程和束调整。
可视化SLAM算法大致可以分为两类。稀疏方法匹配图像的特征点,并使用诸如PTAM和ORB-SLAM等算法。密集方法使用图像的整体亮度,并使用诸如DTAM, LSD-SLAM, DSO和SVO等算法。
结构来源于运动。

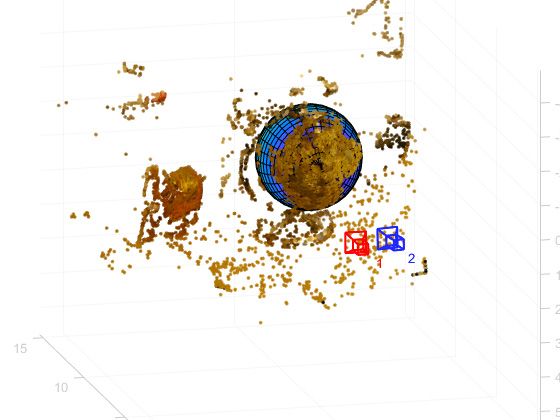
RGB-D SLAM的点云配准
激光雷达大满贯
光探测及测距(激光雷达)是一种主要使用激光传感器(或距离传感器)的方法。
与相机、ToF和其他传感器相比,激光的精度要高得多,并用于自动驾驶汽车和无人机等高速移动车辆的应用。激光传感器的输出值一般为2D (x, y)或3D (x, y, z)点云数据.激光传感器点云提供了高精度的距离测量,并且非常有效地用于使用SLAM进行地图构建。一般来说,运动是通过匹配点云来顺序估计的。计算出的运动(行进距离)用于定位车辆。在激光雷达点云匹配中,采用了迭代最近邻点(ICP)和正态分布变换(NDT)等配准算法。2D或3D点云图可以表示为网格图或体素图。
另一方面,点云在密度方面不像图像那样精细,并不总是提供足够的特征进行匹配。例如,在障碍物很少的地方,很难对齐点云,这可能会导致失去车辆位置的跟踪。此外,点云匹配一般需要较高的处理能力,因此有必要对过程进行优化以提高速度。由于这些挑战,自动驾驶汽车的本地化可能涉及融合其他测量结果,如车轮里程测量、全球导航卫星系统(GNSS)和IMU数据。对于仓库机器人等应用,二维激光雷达SLAM是常用的,而SLAM使用三维激光雷达点云可用于无人机和自动驾驶。
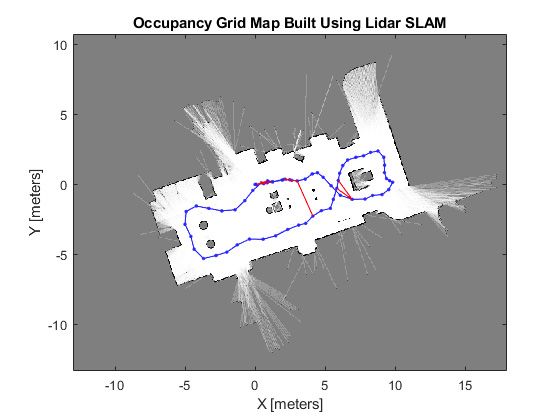
SLAM与2D激光雷达
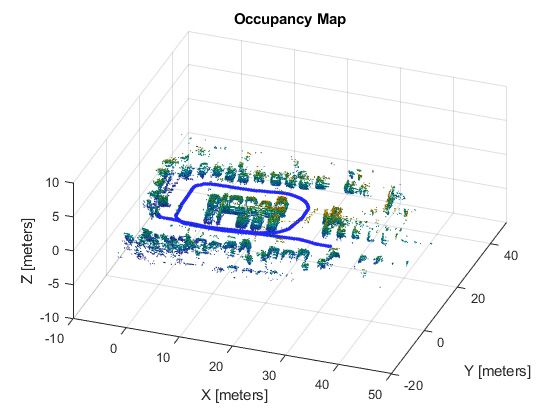
SLAM与3D激光雷达
SLAM的常见挑战
尽管SLAM用于一些实际应用程序,但一些技术挑战阻止了更多通用用途的采用。每个人都有一个可以帮助克服障碍的对策。
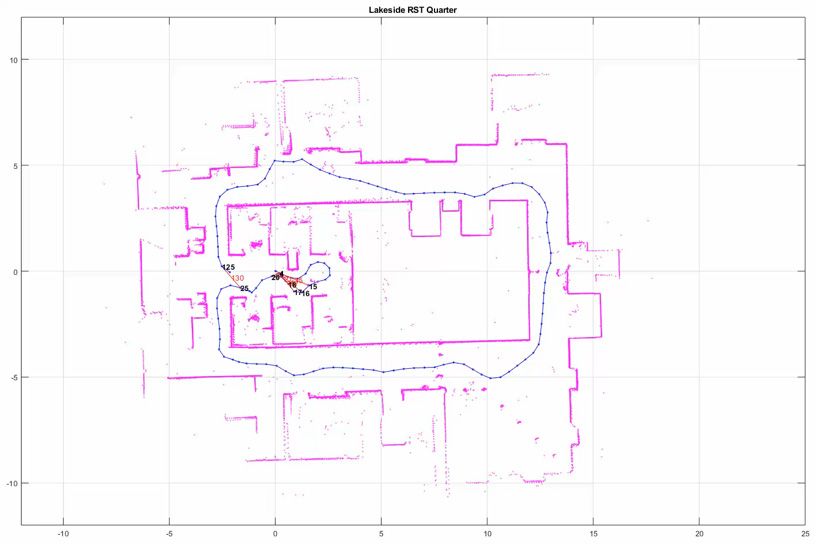
1.定位误差不断累积,与实际值产生较大偏差
SLAM估计连续的移动,其中包括一些误差范围。随着时间的推移,误差不断累积,导致与实际值的很大偏差。它还可能导致地图数据崩溃或扭曲,使后续搜索变得困难。让我们以在一个方形通道中开车为例。随着误差的累积,机器人的起始点和结束点不再匹配。这就是所谓的循环闭合问题。像这样的姿势估计错误是不可避免的。重要的是检测循环闭包,并确定如何纠正或消除累积的错误。
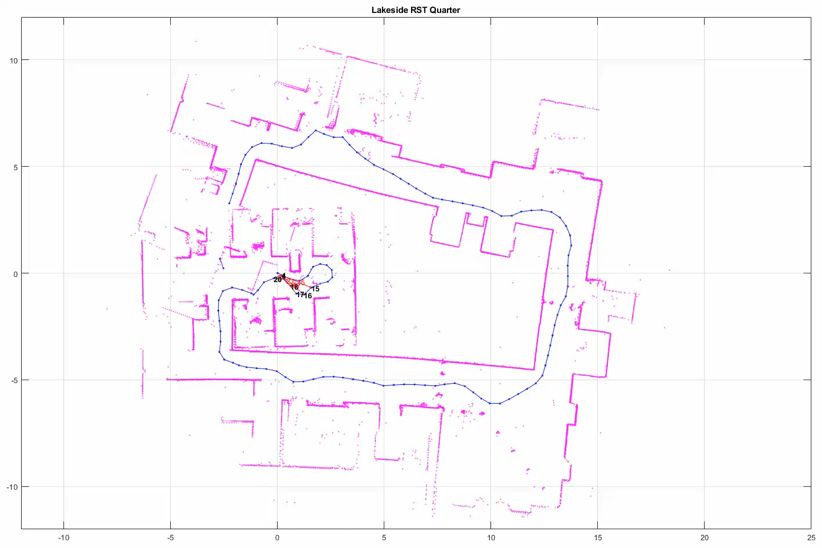
构造一个姿态图和最小化误差的例子。
一个对策就是记住以前去过的地方的一些特征作为地标,尽量减少定位误差。构造姿态图来帮助纠正错误。通过将误差最小化作为优化问题来解决,可以生成更精确的地图数据。这种优化在可视化SLAM中称为束调整。
构造一个姿态图和最小化误差的例子
2.定位失败,地图上的位置丢失
图像和点云映射没有考虑机器人的运动特征。在某些情况下,这种方法可以产生不连续的位置估计。例如,一个计算结果显示,一个以1米/秒的速度移动的机器人突然向前跳了10米。通过使用恢复算法或将运动模型与多个传感器融合,根据传感器数据进行计算,可以防止这种定位失败。
有几种方法可以使用传感器融合的运动模型。常用的方法是使用卡尔曼滤波对本地化。由于大多数差动驱动机器人和四轮车辆一般使用非线性运动模型,扩展卡尔曼滤波器和粒子过滤器(蒙特卡洛定位)是经常使用的。更灵活的贝叶斯滤波器,如无味卡尔曼滤波器,也可以在某些情况下使用。一些常用的传感器是惯性测量装置,如IMU,姿态和航向参考系统或明显惯性导航系统(INS)、加速度计传感器、陀螺传感器和磁传感器)。安装在车辆上的车轮编码器通常用于里程测量。
当本地化失败时,a对策恢复是通过记住一个地标作为以前去过的地方的关键框架。当寻找一个地标,一个特征提取进程以一种可以高速扫描的方式应用。基于图像特征的分类方法有特征袋(BoF)和视觉词袋(BoVW)。最近,深度学习被用于比较特征之间的距离。
3.图像处理、点云处理和优化的计算成本高
在汽车硬件上实现SLAM时,计算成本是一个问题。计算通常在紧凑和低能量的嵌入式微处理器上进行,这些处理器的处理能力有限。为了实现准确的定位,执行是必不可少的图像处理以及高频点云匹配。此外,闭环等优化计算也是高计算量的过程。挑战在于如何在嵌入式微型计算机上执行如此昂贵的计算处理。
一个对策是并行运行不同的进程。特征提取等过程是匹配过程的预处理,相对适合并行化。使用多核cpu进行处理、单指令多数据(SIMD)计算和嵌入式gpu在某些情况下可以进一步提高速度。此外,由于姿态图优化可以在相对较长的周期内执行,因此降低其优先级并定期执行该过程也可以提高性能。
MATLAB®提供了为您的目标系统实现SLAM应用程序的能力,并解决了使用SLAM应对已知技术挑战的许多对策。
SLAM前端的传感器信号和图像处理
- 二维和三维激光雷达处理和扫描匹配使用激光雷达工具箱™而且导航工具箱™
- 三维点云处理点云配准
- 环路闭合检测使用功能包,视觉词汇袋
- 目标检测和语义分割的应用深度学习
- 使用三维激光雷达点云生成地图自动驾驶工具箱™
- 传感器融合在定位和多目标跟踪中的应用传感器融合和跟踪工具箱™
SLAM后端的2D / 3D姿态图
占用网格SLAM地图生成器应用程序
- 从MATLAB工作区或rosbag文件导入二维激光雷达数据并创建占用网格
- 查找和修改循环闭包,并将映射导出为路径规划的占用网格
使用SLAM算法的输出映射路径规划和控制
- 实现路径规划算法等RRT或混合一个*使用导航工具箱
- 发送控制命令到沿着计划好的路线避开障碍物
通过并行运行图像处理等计算密集型流程,可以加快这些流程的速度并行计算工具箱
部署独立的ROS节点,并通过MATLAB和Simulink与支持ROS的机器人通信金宝app®使用ROS工具箱
在嵌入式微处理器上使用MATLAB和Simulink开发的图像处理和导航算法金宝appMATLAB编码器™而且GPU编码器™
了解更多关于SLAM
具有里程碑意义的大满贯
SLAM与虚幻引擎模拟

30天免费试用

问题吗?
您也可以从以下列表中选择一个网站: