在之前的视频中,我们建模了一个三相逆变器,它将直流电源转换为三相电流来控制无刷直流电机。三相逆变器的输入是控制电机相对的通断状态的开关模式。在之前的视频中,我们使用静态开关模式给a和C相通电,观察到转子与定子磁场以30度对齐。在这个视频中,我们将在这个模型中添加换相逻辑,以动态地改变开关模式,使转子连续旋转。
正如我们在我们的第二个技术谈话视频中讨论的,我们需要一个霍尔效应传感器来确定转子是在哪个扇区。换流逻辑然后使用当前扇区选择相应的开关模式。让我们从霍尔效应传感器的建模开始。在实际应用中,霍尔效应传感器通过感知各相周围的磁场来确定电流扇区。然而,为了模拟的目的,我们将假设我们知道角转子的位置,以此来计算扇区。霍尔效应传感器模型的逻辑应该是:如果转子在0°和60°之间,则表示转子在第一个扇区,则输出1。同样,在我们完成转子的全部旋转之前,还有五种情况。
让我们将这个表保存在这里,并尝试在Simulink中建模相同的逻辑。金宝app角位置总是在0和360度之间,这意味着在转子的每一次充分旋转后,我们应该重置为0度。我们可以通过使用Math function块中的剩余可用函数来实现这一点。我们将输入和常量值360到这个块,然后返回除以360度后的余数。我们还将在这里插入一个增益块,并输入极点对的数量p,在我们的情况下是1,已经在MATLAB工作空间中定义了。这样我们就用电子角度来表示转子的位置。现在我们准备用这个逻辑。
对于每种情况,我们都需要检查两个条件。为了实现第一次检查,我们添加了一个Constant块,将其设置为0。然后,我们获取一个Relational Operator块,并选择我们想要用于与0比较的正确操作符。类似地,我们模拟了第二个条件。当这两个条件都满足时,我们希望将扇区设置为1。我们可以通过使用一个与门和一个代表扇区编号的增益来做到这一点。注意,逻辑运算符输出一个布尔值,我们需要将其转换为与增益相同的数据类型。我们可以使用数据类型转换块来实现这一点,该块接受布尔值并将其转换为从增益块继承的数据类型。
根据这个逻辑,当两个条件都满足时,AND运算符将返回1,扇区将被设置为1。如果其中一个或两个条件都不满足,输出将为0,因为这将意味着转子是在另一个扇区。
为了实现其余的条件,我们可以简单地复制并粘贴这一部分,然后像图片中那样调整值。现在,结果值的和将给我们扇区号。注意,每一次这些输出中只有一个是正的,其余的都是0。让我们选择这个部分并创建一个子系统,我们将其称为sensor。
现在我们已经完成了扇区的计算,我们可以用它来建模交换逻辑。正如我们在第二个Tech Talk视频中所讨论的,换相逻辑基本上就像一个包含所有可能的开关模式的表格,并根据扇区信息以正确的顺序输出它们,以正确地旋转转子。
这是第一个转换模式。让我们断开这个连接,并添加我们在图中看到的其余切换模式。为了根据扇区来选择图案,我们将使用一个开关。我们使用Multiport Switch模块。我们需要6个输入,我们把它们连接到我们刚刚创建的开关模式上。第一个输入是通过告诉开关选择什么模式来控制这个开关,所以这里我们需要连接扇区。让我们选择所有这些,并创建一个子系统,我们称之为“交换逻辑”。这样,我们就在电机周围闭合了一个回路,这让我们能够根据我们使用霍尔效应传感器确定的扇区为连续旋转提供正确的相位。
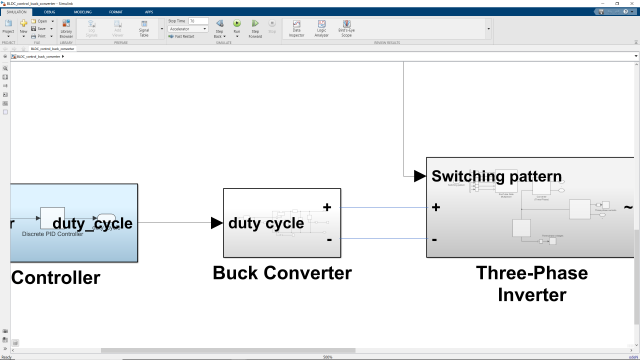
现在我们要记录下转换模式以及" Theta "我们将使用与前一个视频相同的脚本,该脚本使用记录的信号来动画模拟结果。我们首先运行模拟,然后通过在命令行中输入脚本名称来调用脚本。我们看到一切都在按计划进行。这意味着我们正在正确地计算扇区,并在此基础上换相逻辑选择正确的开关模式。现在我们控制马达,但只是以恒定的速度,就像这里看到的。因为电源电压是恒定的。为了能够以不同的速度运行电机,我们需要一个反馈控制器,将调整电源电压三相逆变器。为了建立这个控制回路,我们首先需要计算期望的速度和测量的速度之间的误差,然后将其馈给控制器来调整电压水平。我们测量传感器块下的速度。 Let’s first output the measured speed with an Outport block. We will compare it to a desired speed which we can model using a repeating sequence changing gradually from 0 to 900 RPMs. We insert a Sum block to compute the error between desired and measured speeds which we then input into a PID controller. For speed control, we choose to use a discrete PI-controller. As I tuned the gains before and already know what values work well for my system, I’ll just enter them here. Next, we add a unit delay to prevent any algebraic loop that may occur in this model. Now, we need to feed the voltage computed by the controller into the three-phase inverter. So, we remove the current voltage source and replace it with an ideal voltage source which provides the commanded voltage regardless of the current passing through it.
接下来,我们将记录不同的信号,以便在我们模拟系统后可以查看它们。现在,我们可以运行模型,看看期望的和测量的速度以及控制器计算的电压。我们看到三相逆变器的电压正在被控制器调节,测量的速度成功地跟踪所需的速度。注意电压和电机转速是如何成比例变化的。
总之,在这个视频中,我们向你展示了如何建模换相逻辑,也控制电机速度与一个反馈控制器。在这个模型中,我们使用一个理想的电压源来调节电压水平。但在现实中,电源电压是固定的,我们需要使用一种叫做PWM或脉冲宽度调制的技术来调整它。下次,我们将讨论PWM和实现PWM控制的不同架构。