使用控制系统调谐器应用程序进行鲁棒调谐
Arkadiy Turevskiy, MathWorks
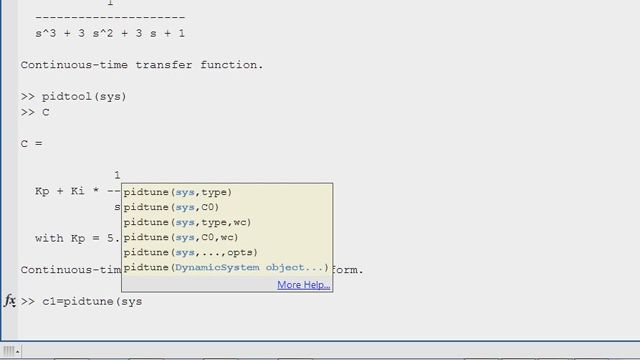
使用“鲁棒控制工具箱™”中的“控制系统调优器”应用程序自动调整控制器,使其在参数值范围内的性能最大化。在这个视频的例子中,工厂是一个质量-弹簧-阻尼系统。质量、弹簧刚度和阻尼的公称值是已知的,但实际参数值与公称值之间的差异可高达40%。其目标是设计一种对厂内模型参数的不确定性具有鲁棒性的PID控制器。
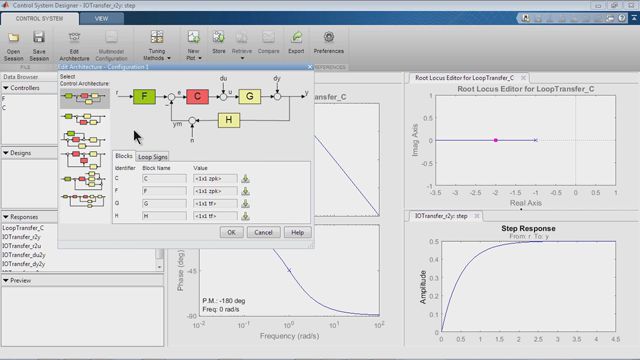
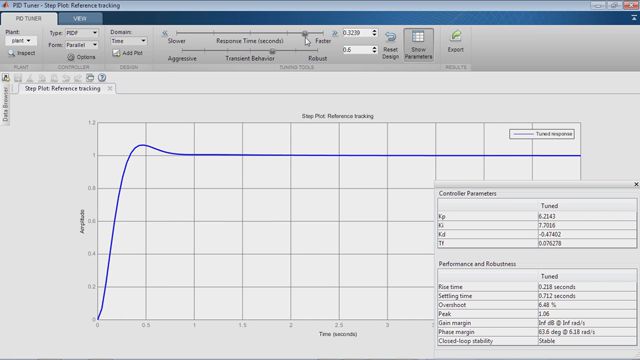
视频展示了如何使用控制系统调谐器应用程序来设计一个鲁棒控制器。在Simulink中对控制器和控制器进行了建模金宝app®。利用鲁棒控制工具箱定义了参数的不确定性。该视频展示了如何使用Simulink Control Design™的块替换功能来线性化工厂模型,同时考虑参数的不确定性。金宝app它演示了如何创建一个不确定的状态空间系统,该系统表示由于厂内参数值的不确定性而导致的工厂动态变化。接下来,使用控制系统调谐器应用程序来调整PID控制器增益,以满足所有可能的工厂参数组合的设计要求。然后,您将看到如何计算闭环系统的最坏情况阶跃响应,并将其与调整为标称植物参数值的PID控制器的最坏情况阶跃响应进行比较。结果表明,鲁棒PID控制器具有较好的最坏情况性能。
产品集中
相关视频和网络研讨会












你也可以从以下列表中选择一个网站: