自定义变量质量6dof(欧拉角)
实施六度自由度运动的欧拉角表示自定义变量质量的运动方程
- 图书馆:
航空航天块组/运动方程式/ 6dof

描述
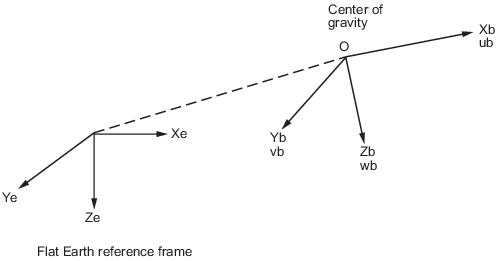
这自定义变量质量6dof(欧拉角)块实现自定义变量的六个自由度方程的欧拉角表示。它考虑了身体固定坐标框的旋转(XB.,Y.B.,z.B.)关于平坦的地球参考框架(XE.,Y.E.,z.E.)。有关欧拉角的更多信息,请参阅算法。
限制
块假设所施力在主体的重心处起作用。
港口
输入
输出
参数
算法
身体固定坐标框的起源是身体的重心。假设身体是刚性的,这消除了需要考虑作用在质量元素之间的力的力。平坦的地球参考框架被认为是惯性的,是允许由于地球运动相对于“固定恒星”而导致的力的近似。
上面给出了身体固定坐标帧的平移运动,其中施加的力[FXFyFZ.]T.处于正文固定框架。逃号B.是体轴上的相对速度,在该主体轴上的质量流量( )被弹出或添加到身体固定轴上。
下面给出了身体固定框架的旋转动力学,其中施加的时刻是[l m n]T.和惯性张量一世是关于起源O.
身体固定角速度向量之间的关系,[P Q R.]T.以及欧拉角的变化率, ,可以通过将欧拉速率解析到正文固定坐标框中来确定。
|
|
反转j然后给出所需的关系以确定欧拉速率矢量。
有关航空航天坐标系的更多信息,请参阅关于航空航天坐标系。
参考
[1]史蒂文斯,布莱恩和弗兰克刘易斯。飞机控制和模拟,第二次。霍博肯,新泽:约翰瓦利&Sons,2003。
[2] Zipfel,Peter H.航空航天车辆动力学的建模与仿真。第二次。Reston,VA:AIAA教育系列,2007年。
扩展能力
也可以看看
6dof(欧拉角)|6dof(四元数)|6DOF ECEF(四元型)|6dof风(四元末)|6dof风(风角)|自定义变量质量6dof(四元数)|自定义变量质量6dof ecef(四元轴)|自定义变量6dof风(四元轴)|自定义变量6dof风(风角)|简单的可变质量6dof(欧拉角)|简单的可变质量6dof(四元数)|简单的变量质量6dof Ecef(四元型)|简单的变量质量6dof风(四元型)|简单的变量质量6dof风(风角)
话题
您还可以从以下列表中选择一个网站: