交互式地从响应数据估计植物参数
这个例子展示了如何使用PID调谐器拟合一个线性模型,以测量SISO响应数据。
如果您有系统识别工具箱™软件,您可以使用PID调谐器根据从系统测量的时域响应数据估计线性电厂模型的参数。PID调谐器然后,为得到的估计模型调整PID控制器。PID调谐器提供几种技术,以图形化、手动或自动调整估计模型,以匹配您的响应数据。这个例子说明了其中的一些技巧。
在本例中,将测量的响应数据从数据文件加载到MATLAB中®工作区你将植物作为一个线性时不变模型.有关从Simulink生成模拟数据的信息金宝app®模型中,看到根据测量或模拟的响应数据交互式地估计电厂(金宝app仿真软件控制设计).
导入识别响应数据
开放PID调谐器并将负载测量的响应数据输入MATLAB工作空间。
PID调谐器(tf(1),“圆周率”)装载PIDPlantMeasuredIOData
导入响应数据时,PID调谐器假设你的测量数据代表一个在负反馈回路中连接到PID控制器的植物。换句话说,PID调谐器假设您的系统具有以下结构。PID调谐器假设您在植物输入端注入了一个步进信号
u测量了系统的响应y,如图所示。
本例的示例数据文件包含三个变量,每个变量都是501-by-1数组。
inputu单位阶跃函数是在u获取响应数据。输出量系统的测量响应是在y.时间向量t,从0到50秒,采样时间0.1秒。比较inputu来t显示步骤发生在t= 5 s。提示
您可以导入存储为数字数组(如本例中所示)的响应数据
timeseries对象,或一个iddata(系统识别工具箱)对象在里面PID调谐器,在植物菜单中,选择
确定新工厂.
在植物鉴别选项卡上,单击
 获取I/O数据并选择阶跃响应.此操作将打开进口的阶跃响应对话框。
获取I/O数据并选择阶跃响应.此操作将打开进口的阶跃响应对话框。输入有关响应数据的信息。输出信号是测量到的系统响应,
输出量这个input step signal is parametrized as shown in the diagram in the dialog box. Here, enter5对于起效滞后和0.1为样品时间这个n, click 进口.
进口.
的植物鉴别图显示了响应数据和一个初步估计的植物的响应。





数据进行预处理
根据响应数据的质量和特性,您可能需要对数据执行一些预处理,以改进估计的工厂结果。PID调谐器提供多个用于预处理响应数据的选项,例如删除偏移、筛选或提取数据子集。在此示例中,响应数据具有偏移量。消除数据偏移对于良好的识别结果非常重要。使用进行预处理菜单上这样做。(有关其他数据预处理选项的信息,请参见数据进行预处理.)
在植物鉴别选项卡上,单击
 进行预处理并选择
进行预处理并选择删除抵消这个删除抵消选项卡打开,显示响应数据和相应输入信号的时间图。选择从信号中删除偏移量选择答案,
输出(y).在删除的偏移量文本框中,指定值为2。您也可以选择信号初始值或信号平均值,或输入一个数值。绘图将更新为显示应用偏移的信号的附加轨迹。
点击
 应用保存对信号的改变。点击
应用保存对信号的改变。点击 关闭删除抵消返回植物鉴别选项卡。
关闭删除抵消返回植物鉴别选项卡。PID调谐器根据预处理的响应信号自动调整植物参数,为植物创建一个新的初始猜测。

调整设备结构和参数
PID调谐器允许您指定一个植物结构,例如一个极,欠阻尼的一对,或状态空间模型.在结构菜单中,选择最符合您反应的植物结构。您还可以向设备添加传输延迟、零或积分器。对于本例,单极结构给出了定性正确的响应。您可以对电厂结构和参数值进行进一步调整,以使估计的系统响应与测量的响应数据更好地匹配。
PID调谐器提供了几种调整设备参数的方法:
通过拖动绘图上的调整器,以图形方式调整估计系统的响应。在本例中,拖动红色
x调整估计的电厂时间常数。PID调谐器重新计算系统参数。当你改变估计的系统响应时,很明显在阶跃输入的应用之间存在一些时间延迟t=5 s,以及系统对该阶跃输入的响应。
将传输延迟添加到估计的工厂模型中,在植物结构部分,检查延迟。绘图上会出现一条垂直线,指示延迟的当前值。向左或向右拖动该线可更改延迟,并通过拖动红色按钮对系统响应进行进一步调整
x.调整系统参数的数值,如增益、时间常数和时间延迟。单击,对系统参数进行数值调整
 编辑参数.
编辑参数.假设您从一个独立的测量得知系统中的传输延迟是1.5秒。在设备参数对话框,输入1.5τ检查修理来修复参数值。当你检查修理对于一个参数,对估计的电厂模型进行图形或自动调整都不会影响该参数值。

自动优化系统参数以匹配测量的响应数据。点击
 汽车估计使用当前值作为初始猜测更新估计的系统参数。
汽车估计使用当前值作为初始猜测更新估计的系统参数。


您可以继续使用这些方法中的任何一种进行迭代,以调整电厂结构和参数值,直到估计系统的响应与测量的响应充分匹配。
节省设备并调整PID控制器
当你对合身满意时,点击![]() 应用.这样做可以节省估计的设备,
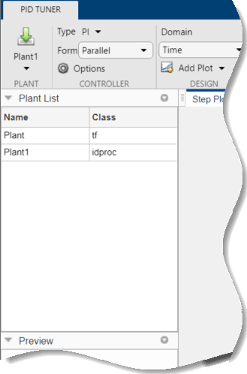
应用.这样做可以节省估计的设备,工厂1,PID调谐器工作区。PID调谐器自动设计PI控制器工厂1而且,在步进图:参考跟踪Plot,显示一个新的闭环响应。的植物名录表反映了工厂1为当前控制器设计选择。

提示
检查存储在PID调谐器工作区,查看植物名录.
您现在可以使用PID调谐器用于优化估计设备的控制器设计并检查调谐系统响应的工具。
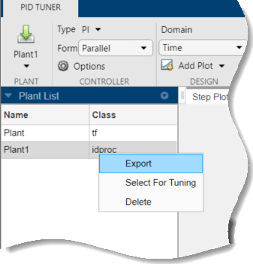
您还可以从中导出已标识的设备PID调谐器工作空间到MATLAB工作空间进行进一步分析PID调谐器选项卡上,单击![]() 出口。检查要导出到MATLAB工作区的植物模型。对于本例,请导出
出口。检查要导出到MATLAB工作区的植物模型。对于本例,请导出工厂1,您从响应数据中识别的电厂。还可以导出调整后的PID控制器。点击![]() 好啊. 选定的模型将保存到MATLAB工作区。
好啊. 选定的模型将保存到MATLAB工作区。
已识别的电厂模型保存为已识别的LTI模型,例如idproc(系统识别工具箱)或中的难点(系统识别工具箱).
提示
或者,右键单击数据浏览器选择它进行调整或将其导出到MATLAB工作区。
相关话题
您还可以从以下列表中选择网站:
