文档帮助中心文档
使用状态空间控制设计方法,如LQG/LQR和极点配置算法。工具箱还提供了设计观测器的工具,包括线性和非线性卡尔曼滤波器。
使用扩展卡尔曼滤波器块来估计多个传感器以不同采样率运行的系统状态。
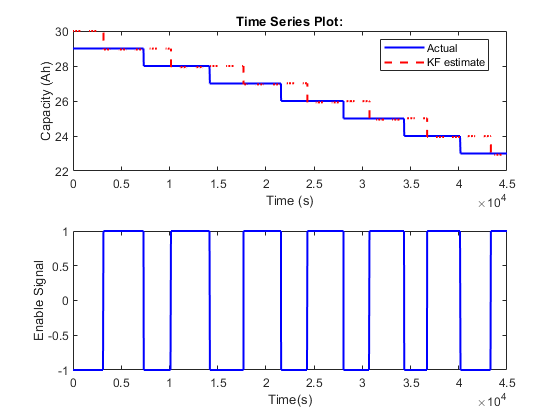
利用Simulink中的无迹卡尔曼滤波器估计非线性系统的状态™. 该示例还说明了如何开发基于事件的卡尔曼滤波器来更新系统参数,以便进行更精确的状态估计。此示金宝app例还需要Simscape™ 和Stateflow®。
您单击了与此MATLAB命令对应的链接:
通过在MATLAB命令窗口中输入命令来运行该命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站以获取翻译后的内容(如果可用),并查看本地活动和优惠。根据您的位置,我们建议您选择:.
您还可以从以下列表中选择网站:
选择中国站点(中文或英文)以获得最佳站点性能。其他MathWorks国家/地区网站未针对您所在地的访问进行优化。
联系当地办事处