三层建筑的主动振动控制
这个示例使用systune来控制三层楼建筑的震动。
背景
本实例考虑了一个用于三层实验结构的主动质量驱动器(AMD)控制系统的隔振。该装置用于评估控制设计技术,以提高土木工程结构在地震期间的安全性。该结构由三层楼组成,顶层有一个主动质量驱动器,用于衰减地面扰动。这个应用程序是从结构控制中的基准问题:第一部分-有源质量驱动系统王志强,王志强,王志强,地震工程与结构动力学,第11卷,1998年第1期。

图1:主动质量驱动控制系统
这种植物P是一个28状态模型,有以下状态变量:
x(我):第i层相对地面的位移(cm)xm: AMD相对于三楼的位移(cm)十五(我):第i层相对地面的速度(cm/s)xvm: AMD相对地面的速度(cm/s)xa(我):第i层相对地面加速度(g)xam: AMD相对地面的加速度(g)d (1) = x (1),d (2) = x (2) - x (1),d (3) = x (3) - x (2): inter-story飘
输入是地面加速度xag(in g)和控制信号u.我们用1g = 981 cm/s^2。
负载ThreeStoryData大小(P)
有20个输出,2个输入和28个状态的状态空间模型。
地震加速度模型
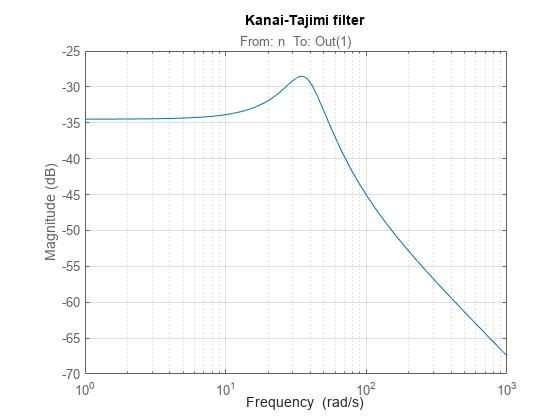
地震加速度模型是通过Kanai-Tajimi滤波器过滤的白噪声过程。
zg = 0.3;wg = 37.3;S0 = 0.03 * zg /(π* wg * (4 * zg ^ 2 + 1));分子=根号(S0)*[2*zg*wg wg^2];分母= [1 2*zg*wg wg^2];F =√2 *π*特遣部队(分子、分母);F.InputName =“n”;白噪声输入百分比bodemag网格(F)标题(“Kanai-Tajimi过滤”)
开环特性
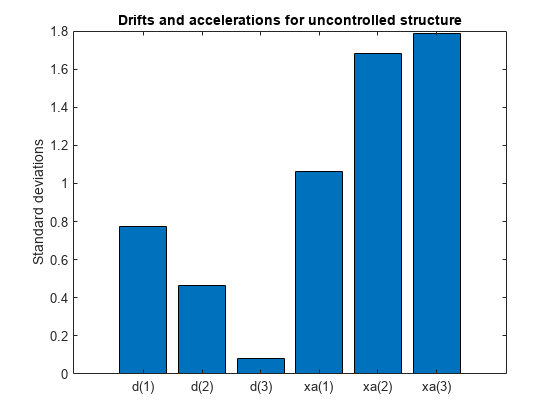
地震对无控制结构的影响可以通过注入白噪声来模拟n进入植物-过滤器组合。你也可以用柯伐合金直接计算由此产生的层间漂移和加速度的标准差。
添加Kanai-Tajimi过滤器到植物PF = P *附加(F, 1);开环漂移的标准差简历=柯伐合金(PF (' d ',“n”), 1);d0 =√诊断接头(CV));开环加速度的标准差简历=柯伐合金(PF (“xa”,“n”), 1);xa0 =√诊断接头(CV));%绘制开环均方根值clf栏([d0;xa0])标题(“不受控结构的漂移和加速度”) ylabel (“标准差”甘氨胆酸)组(,“XTickLabel”, {“d(1)”,“d(2)”,“d(3)”,“xa(1)”,“xa(2)”,“xa(3)”})
控制结构和设计要求
控制结构如图2所示。

图2:控制结构
控制器
使用测量yxa和yxam的xagydF4y2Ba和xam来产生控制信号u.身体,控制u是一种电流驱动液压驱动器,移动AMD的质量。设计要求包括:
最小化层间漂移
d(我)和加速度xa(我)在质量位移方面的控制努力的硬约束
xm,质量加速度xam,以及控制努力u
所有的设计要求都是根据相应信号的标准差来评估的。使用TuningGoal。方差用各变量的开环标准差来表示这些要求,并对各变量进行标度,寻求各变量的统一相对改进。
%对漂移和加速度的软要求软= [...TuningGoal。方差(“n”,“d(1)”, d0 (1));...TuningGoal。方差(“n”,“d(2)”, d0 (2));...TuningGoal。方差(“n”,“d(3)”, d0 (3));...TuningGoal。方差(“n”,“xa(1)”, xa0 (1));...TuningGoal。方差(“n”,“xa(2)”xa0 (2));...TuningGoal。方差(“n”,“xa(3)”, xa0 (3)));%控制努力的硬性要求硬= [...TuningGoal。方差(“n”,xm的3);...TuningGoal。方差(“n”,“xam”2);...TuningGoal。方差(“n”,“u”1)];
控制器调优
systune允许您根据这些要求调整几乎任何控制器结构。控制器的复杂性可以通过试错来调整,从足够高的顺序开始,以衡量性能的限制,然后降低顺序,直到您观察到明显的性能下降。对于本例,从一个没有馈通项的五阶控制器开始。
C =可调参数(“C”、5、1、4);C.D.Value = 0;C.D.Free = false;%固定馈通为零
构建一个可调模型T0对图2中的闭环系统进行参数整定systune.
%构建可调闭环模型T0 =融通(PF, C);调谐控制器参数[T fSoft gHard] = systune (T0,软,硬);
Final: Soft = 0.601, Hard = 0.99981, Iterations = 210
总结表明,我们总体上降低了40%的标准差(软= 0.6),同时满足所有硬约束(硬< 1).
验证
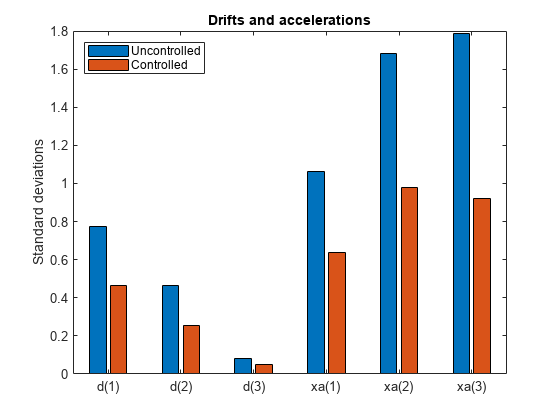
计算受控结构的漂移和加速度的标准差,并与不受控结果进行比较。AMD控制系统显著降低了漂移和加速度。
%闭环漂移的标准差简历=柯伐合金(T (' d ',“n”), 1);d =√诊断接头(CV));%闭环加速度的标准差简历=柯伐合金(T (“xa”,“n”), 1);xa =√诊断接头(CV));%比较开环和闭环值clf酒吧([d0 d;xa0 xa)标题(漂移和加速度) ylabel (“标准差”甘氨胆酸)组(,“XTickLabel”, {“d(1)”,“d(2)”,“d(3)”,“xa(1)”,“xa(2)”,“xa(3)”})(传说“不受控制”,“控制”,“位置”,“西北”)
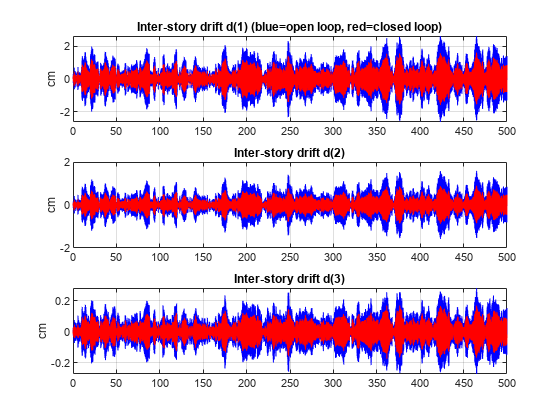
在开环和闭环中模拟三层结构在类地震激励下的响应。地震加速度模型是一个白噪声过程,由Kanai-Tajimi滤波器着色。
%采样白噪声过程rng (“默认”) dt = 1e-3;t = 0: dt: 500;n = randn 1,长度(t)) /√(dt);白噪声信号%%开环仿真ysimOL = lsim(PF(:,1), n, t);%闭环仿真ysimCL = lsim(T, n, T);%的雪堆clf次要情节(1,1)情节(t, ysimOL (:, 13),“b”t ysimCL (: 13)“r”网格)标题('层间漂移d(1)(蓝色=开环,红色=闭环)') ylabel (“厘米”次要情节(3、1、2)情节(t, ysimOL (:, 14),“b”t ysimCL (:, 14),“r”网格)标题(“Inter-story漂移d(2)”) ylabel (“厘米”次要情节(3,1,3)情节(t, ysimOL (:, 15),“b”t ysimCL (:, 15),“r”网格)标题(“Inter-story漂移d(3)”) ylabel (“厘米”)
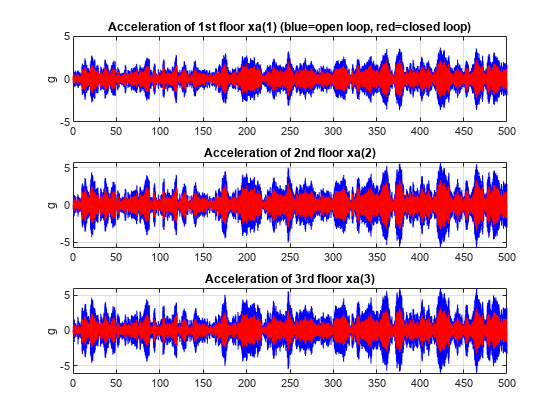
加速度
clf次要情节(1,1)情节(t, ysimOL (:, 9),“b”t ysimCL (:, 9),“r”网格)标题(1楼加速度xa(1)(蓝色=开环,红色=闭环)) ylabel (‘g’次要情节(3、1、2)情节(t, ysimOL (:, 10),“b”t ysimCL (:, 10),“r”网格)标题(“二楼加速度xa(2)”) ylabel (‘g’次要情节(3,1,3)情节(t, ysimOL (:, 11),“b”t ysimCL (: 11),“r”网格)标题(“3楼加速度xa(3)”) ylabel (‘g’)
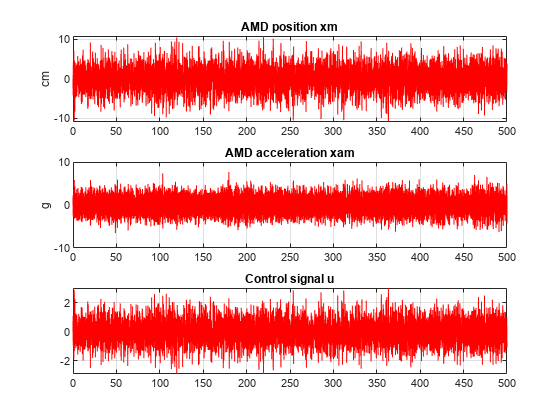
控制变量
clf次要情节(1,1)情节(t, ysimCL (:, 4),“r”网格)标题(AMD位置xm的) ylabel (“厘米”次要情节(3、1、2)情节(t, ysimCL (: 12),“r”网格)标题(“AMD加速度xam”) ylabel (‘g’次要情节(3,1,3)情节(t, ysimCL (:, 16),“r”网格)标题(的控制信号u ')
绘制受控和非受控情景下模拟信号的均方根(RMS)。假设遍历性,RMS性能可以从一个足够长的过程模拟中估计出来,并且与前面计算的标准偏差一致。的确,均方根图与之前得到的标准差图非常吻合。
clf栏([性病(ysimOL(:, 13:15)性病(ysimOL(:,九11));...性病(ysimCL(:, 13:15))性病(ysimCL(:,九11))))标题(漂移和加速度) ylabel (“模拟有效值”甘氨胆酸)组(,“XTickLabel”, {“d(1)”,“d(2)”,“d(3)”,“xa(1)”,“xa(2)”,“xa(3)”})(传说“不受控制”,“控制”,“位置”,“西北”)

总的来说,该控制器在满足控制努力和质量位移的硬约束的同时,在所有楼层的漂移和加速度方面都实现了显著的地面振动降低。
另请参阅
systune|isPassive|TuningGoal。方差
相关的话题
你也可以从以下列表中选择一个网站:
