化学反应器装置内模控制器设计
这个例子展示了如何使用控制系统设计器在串联化学反应器的IMC结构中设计补偿器。在过程控制应用中,基于模型的控制系统通常用于跟踪设定值和拒绝负载扰动。
植物模型
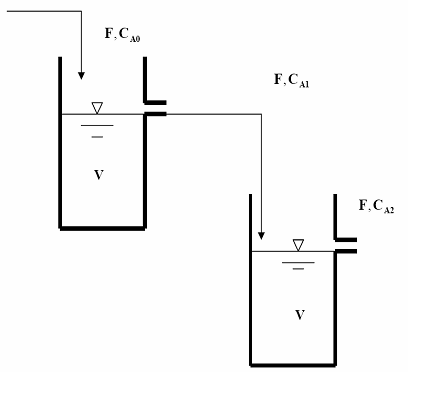
这个例子中的装置是一个化学反应器系统,由两个混合良好的储罐组成。

反应器是等温的,每个反应器中的反应是A组分的一级反应:

物料平衡应用于系统,以生成系统的动态模型。由于溢流喷嘴的存在,假定储罐液位保持恒定,因此不涉及液位控制。
有关该工厂的详细信息,请参见Thomas E.Marlin的“过程控制:动态性能的设计过程和控制系统”第3章中的示例3.3。
以下微分方程描述了部件平衡:


在稳定状态下,


物料结余如下:


哪里 ,
, ,
, 是稳态值。
是稳态值。
代之,设计规范及反应器参数如下:




两个反应器中产生的稳态浓度为:


哪里

对于本例,设计一个控制器,以保持第二个反应器的反应物出口浓度, 在进料浓度存在任何干扰的情况下,
在进料浓度存在任何干扰的情况下, .操纵变量是反应物的摩尔流速,
.操纵变量是反应物的摩尔流速,F,进入第一个反应堆。
线性植物模型
在这个控制设计问题中,被控对象模型为

扰动模型为

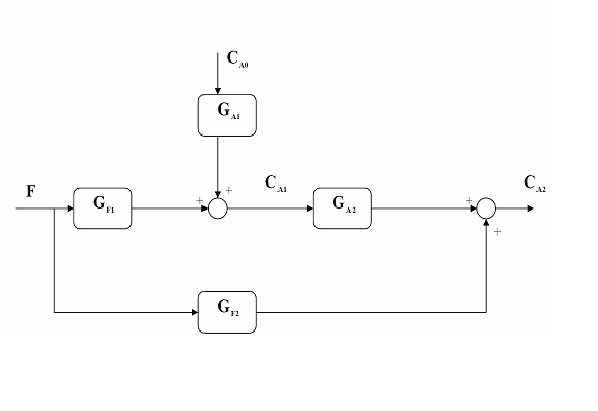
这个化学过程可以用下面的框图来表示:

哪里




根据方框图,得到植物模型和扰动模型如下:


在命令行中创建工厂模型:
s=tf('s'); G1=(13.3259*s+3.2239)/(8.2677*s+1)^2;G2=G1;Gd=0.4480/(8.2677*s+1)^2;
G1是控制器评估中使用的真实对象。G2是真实对象的近似值,在IMC结构中用作预测模型。G2=G1这意味着没有模型不匹配。钆是扰动模型。
在控制系统设计中定义IMC结构
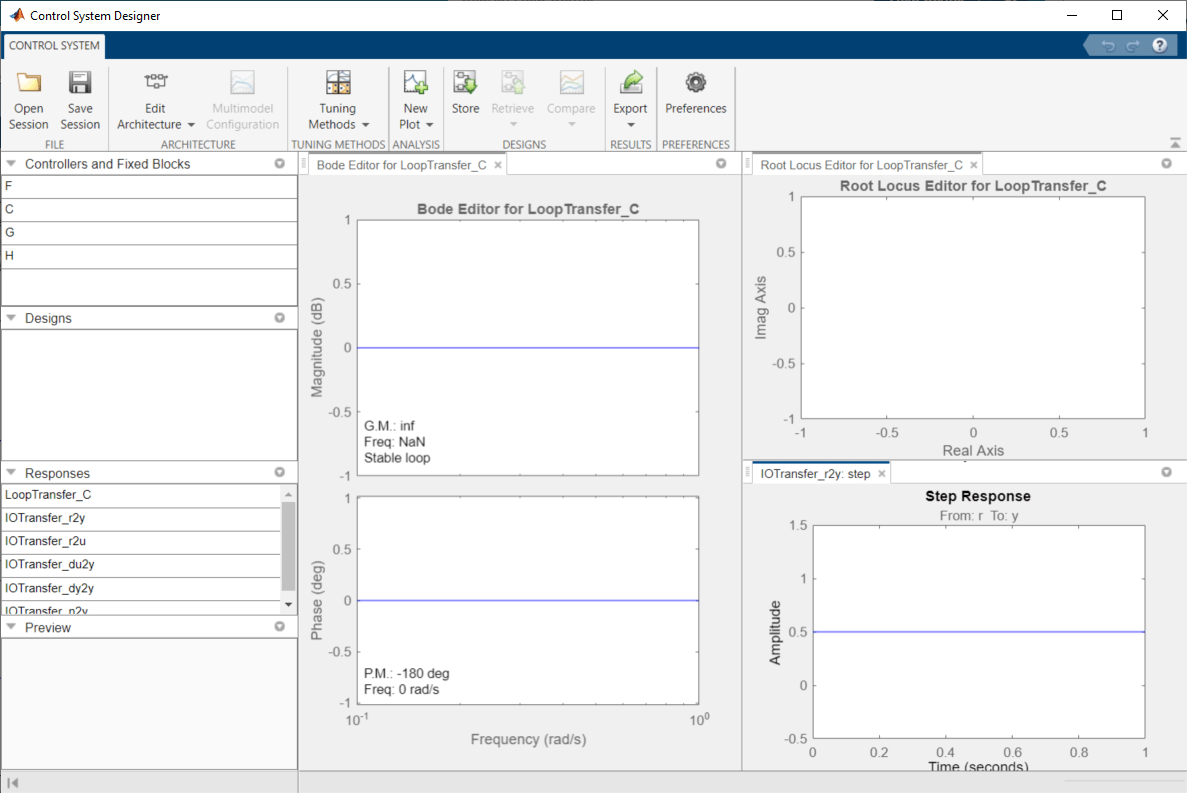
开放式控制系统设计器。
控制系统设计器

选择IMC控制体系结构。在控制系统设计器中,单击编辑架构. 在“编辑体系结构”对话框中,选择“配置5”。

加载系统数据。对于G1,G2,钆,指定一个模型价值.

调整补偿器
绘制电机的开环阶跃响应G1.
步骤(G1)
右键单击图并选择特性>上升时间子菜单。单击蓝色上升时间标记。

上升时间约为25秒,我们希望调整IMC补偿器,以实现更快的闭环响应时间。
要调整IMC补偿器,请在控制系统设计器中单击调优方法,然后选择内部模型控制(IMC)调整.

选择一个主导闭环时间常数的2.和一个期望控制器顺序的2..

要查看闭环阶跃响应,请在控制系统设计器中双击IOTransfer_r2y:步骤图选项卡。

模型不匹配的控制性能
在设计控制器时,我们假设G1等于G2。实际上,它们通常是不同的,控制器需要足够鲁棒,以跟踪设定点并抑制干扰。
在G1和G2之间创建模型不匹配,并在设置点变化和负载扰动的情况下,在MATLAB命令行上检查控制性能。
将IMC补偿器导出到MATLAB工作区。单击出口.在导出模型对话框中,选择补偿器模型C.

点击出口.
将内模控制结构转换为经典的反馈控制结构,控制器位于前馈路径和单元反馈中。
C=zpk([-0.121-0.121]、-0.242-0.466]、2.39);C_新=反馈(C,G2,+1)
C_new = 2.39 (s + 0.121) ^ 4 --------------------------------------------- ( s - 0.0001594) (s + 0.121) (s + 0.1213) (s + 0.2419)连续时间零/钢管/增益模型。
定义以下工厂模型:
没有模型不匹配:
G1p = (13.3259 * s + 3.2239) / (8.2677 * s + 1) ^ 2;
G1时间常数变化5%:
G1t=(13.3259*s+3.2239)/(8.7*s+1)^2;
G1增益增加3倍:
G1g=3*(13.3259*s+3.2239)/(8.2677*s+1)^2;
评估设定点跟踪性能。
步骤(反馈(G1p * C_new, 1),反馈(G1t * C_new, 1),反馈(G1g * C_new, 1))传说(“没有模型不匹配”,“时间常数失配”,“增益不匹配”)
评估抗扰性能。
步骤(Gd*反馈(1,G1p*C_新)、Gd*反馈(1,G1t*C_新)、Gd*反馈(1,G1g*C_新))图例(“没有模型不匹配”,“时间常数失配”,“增益不匹配”)
该控制器对对象参数的不确定性具有较强的鲁棒性。
另见
相关的话题
你也可以从以下列表中选择一个网站:
