被动控制与通信延迟
这个例子展示了如何减轻通信延迟一个被动控制系统。
Passivity-Based控制
被动的定理,两个严格被动的负反馈互连系统 和
和 总是稳定的。
总是稳定的。
当身体的工厂是被动的,因此有利于使用被动控制器的鲁棒性和安全原因。然而,在网络化控制系统,通信延迟可以撤销摘要根据无源性控制的好处导致不稳定。为了说明这一点,我们使用的植物和二阶无源控制器“柔性梁的振动控制”的例子。看到这个例子背景底层控制问题。加载装置模型 和被动控制器
和被动控制器 (注意,对应于
(注意,对应于 在其他的例子中)。
在其他的例子中)。
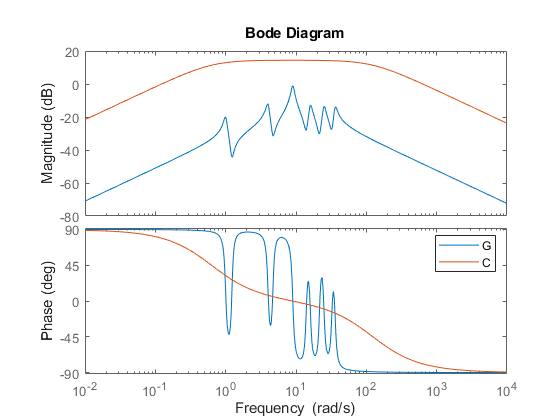
负载BeamControlGC波德(G、C、{1飞行,1 e4})传说(‘G’,“C”)
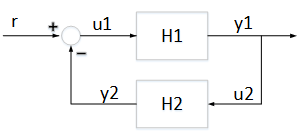
控制配置如下所示,以及脉冲响应 来
来 。
。

冲动(反馈(G、C))

不稳定的通信延迟的影响
现在假设有实质性的传感器和控制器之间的通信延迟,控制器和执行器之间。这种情况在仿真软件建模如下。金宝app
open_system (“DelayedFeedback”)

设置通信延迟
T1 = 1;T2 = 2;
这个模型模拟表明,通信延迟破坏反馈循环。

散射变换
减轻延迟影响,您可以使用一个简单的线性变换的植物之间交换信号通过网络和控制器。
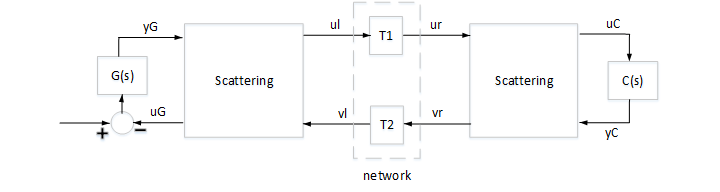
图1:网络控制系统
这就是所谓的“散射变换”和公式

或者同样的

与 。请注意,在没有延迟的情况下,两个散射变换相互抵消和图1中的框图相当于负反馈的互连和。
。请注意,在没有延迟的情况下,两个散射变换相互抵消和图1中的框图相当于负反馈的互连和。
然而,当存在延迟 不再是等于什么
不再是等于什么 这种散射变换改变闭环系统的属性。事实上,观察
这种散射变换改变闭环系统的属性。事实上,观察

这 和
和 严格无源保证
严格无源保证

小增益定理保证反馈互连图1的总是稳定的无论多么大的延误。确认通过构建的仿真软件模型框图如图1所示的值金宝app 。
。
b = 1;open_system (“ScatteringTransformation”)

模拟脉冲响应的闭环系统。反应现在稳定,类似于delay-free反应尽管大的延误。

散射变换的更多细节,请参阅t . Matiakis s Hirche和m .巴斯”Independent-of-Delay稳定散射变换的非线性网络化控制系统,“学报2006年美国控制会议,2006年,页2801 - 2806。