使用控制系统调谐器调整控制系统
这个例子展示了如何使用控制系统调谐器应用程序调优MIMO,多环控制系统在Simulink®建模。金宝app
Control System Tuner允许您对任何控制体系结构建模,并指定控制器组件的结构,如PID控制器、增益和其他元素。您可以指定模型中的哪些块是可调的。控制系统调谐器参数化那些块和调谐自由参数系统,以满足您指定的设计要求,如设置点跟踪,干扰抑制,和稳定裕度。
控制系统模型
这个例子使用了Simulink模型金宝apprct_helico.打开模型。
open_system (“rct_helico”)
植物,直升机,是一种8状态直升机模型调整到一个稳定的悬停状态。的状态向量x = [u, w, q,θ,v, p,φ,r)包括:
纵向速度
u(米/秒)正常的速度
w(米/秒)节速度
问(度/秒)螺旋角
θ(度)横向速度
v(米/秒)滚转率
p(度/秒)横摇角
φ(度)偏航率
r(度/秒)
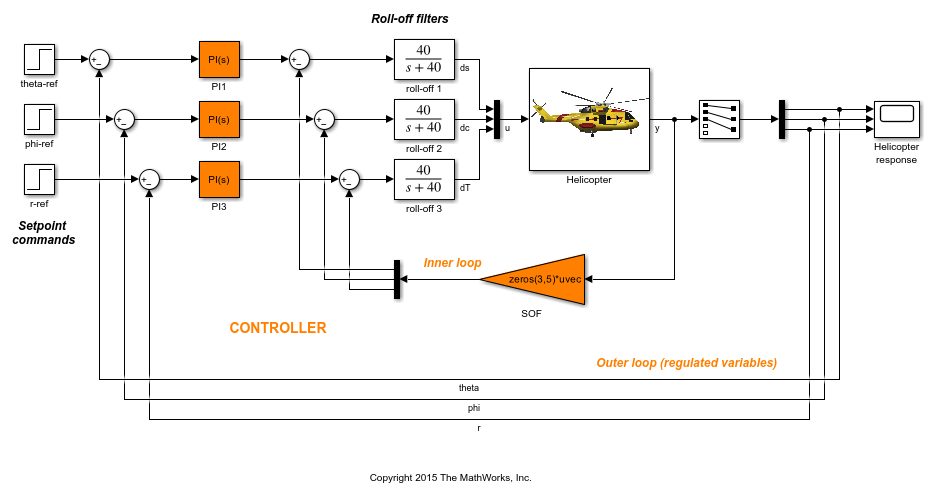
该模型的控制系统有两个反馈回路。内环为稳定性增强和解耦提供静态输出反馈,在模型中由增益块表示SOF.外环有三个姿态角的PI控制器。控制器生成命令ds特区dT在度为纵向循环,横向循环,和尾桨集体使用的测量θ,φ,p,问,r.这个循环为三个角度提供所需的设置点跟踪。
这个例子使用了这些控制目标:
轨迹设定点的变化
θ,φ,r稳定状态误差为零,上升时间约为2秒,超调量最小,交叉耦合最小。限制控制带宽,以防止忽略高频转子动力学和测量噪声。(该模型包含低通滤波器,部分实现了这一目标。)
提供强大的多变量增益和相位裕度。(多变量裕度测量在设备输入和输出时同步增益或相位变化的鲁棒性。看到
diskmargin详情参考页。)
为调优设置模型
使用控制系统调谐器,您可以共同调整内部和外部回路,以满足所有的设计要求。要设置用于调优的模型,请打开应用程序并指定要调优的Simulink模型的哪个块。金宝app
在Simuli金宝appnk模型窗口中,在控制系统在应用程序选项卡上,选择控制系统调谐器.
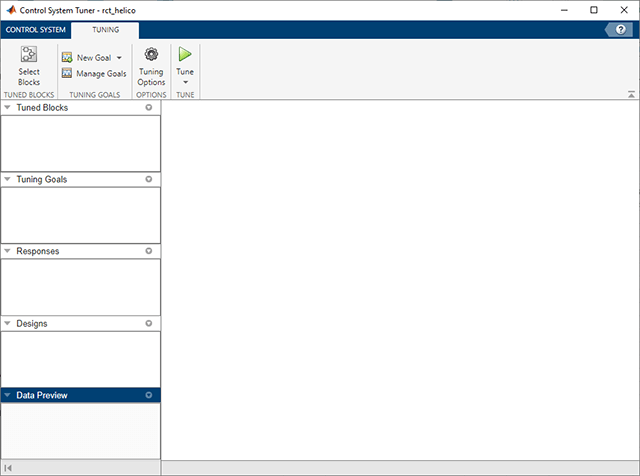
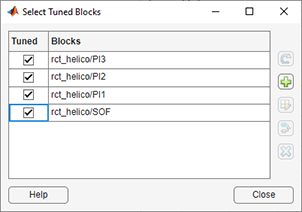
在控制系统调谐器,在调优选项卡上,单击选择模块.使用“选择调优块”对话框指定要调优的块。
点击添加模块.Control System Tuner分析你的模型,找到可以调优的模块。在这个例子中,要调整的控制器块是三个PI控制器和增益块。检查相应的块₁,皮,PI3,SOF.
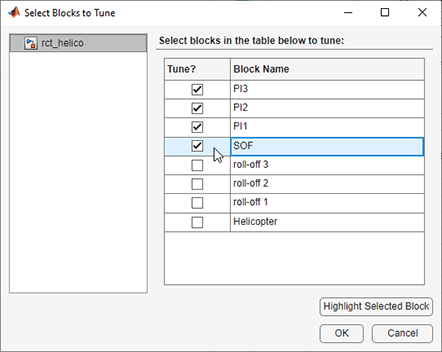
点击好吧.选择调优块对话框现在反映您添加的块。
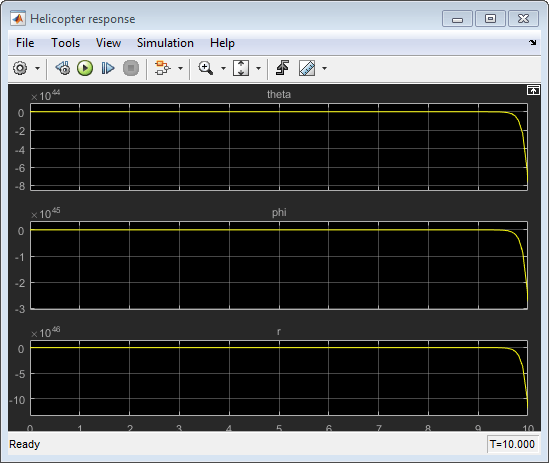
当您选择要调优的块时,Control System Tuner会根据其类型自动参数化块,并在Simulink模型中使用块值初始化参数化。金宝app在本例中,PI控制器被初始化为 所有通道的静态输出反馈增益都初始化为零。仿真结果表明,对于这些初始值,控制系统是不稳定的。
所有通道的静态输出反馈增益都初始化为零。仿真结果表明,对于这些初始值,控制系统是不稳定的。
指定优化目标
这个系统的设计要求,前面讨论过,包括设置点跟踪,最小稳定裕度,和快速动力学的限制。在控制系统调谐器中,您可以使用调优目标.
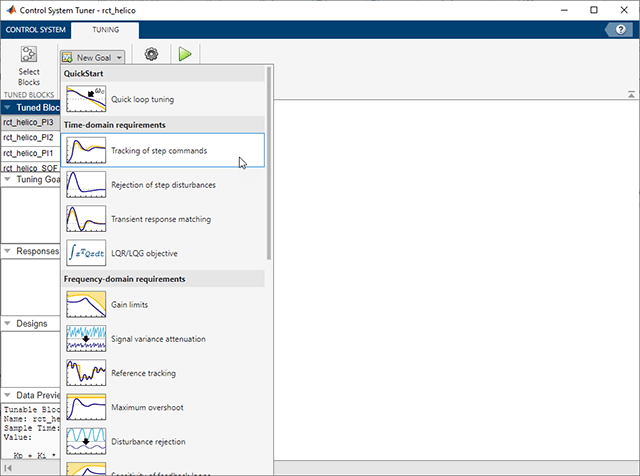
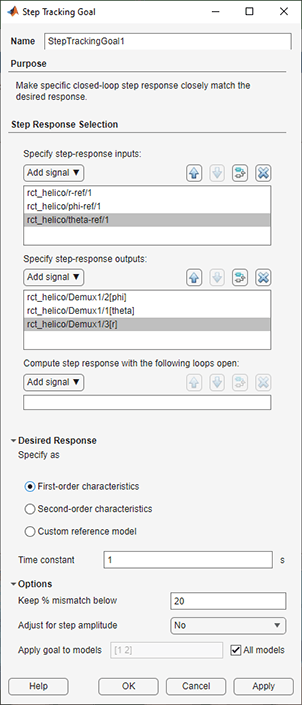
首先,为设置点跟踪需求创建一个调优目标θ,φ,r.在调优选项卡,新目标下拉列表中,选择step命令跟踪.
在步骤跟踪目标对话框中,指定跟踪的参考信号。下指定输入阶跃响应,点击向列表添加信号.然后单击从模型中选择信号.
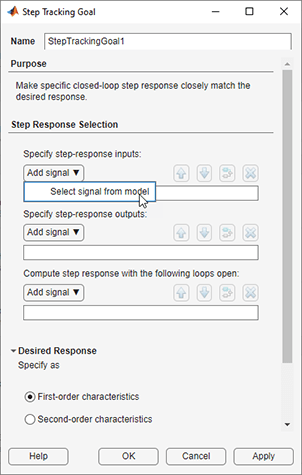
在Simuli金宝appnk模型编辑器中,选择参考信号theta_ref,phi_ref,r_ref.这些信号出现在“选择信号”对话框中。点击添加信号(年代)将它们添加到步骤跟踪目标中。
接下来,指定要跟踪这些引用的输出。下指定输出阶跃响应,添加输出θ,φ,r.
要求是,输出端的响应使用一阶响应跟踪参考命令,该响应具有一秒的时间常数。将这些值输入期望的反应对话框的一部分。同样,对于这个示例集把下面的不匹配为20。此值设置目标一阶响应与调整后的响应之间20%的相对不匹配。
此图显示了Step Tracking Goal对话框的配置。点击好吧保存调优目标。
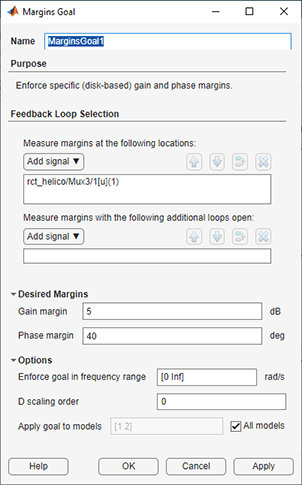
接下来,为期望的稳定性裕度需求创建调优目标。对于这个例子,多变量增益和相位裕度在工厂的输入u和植物输出y至少5db, 40度。为输入和输出裕度约束创建单独的调优目标。在新目标下拉列表中,选择最低稳定利润.在“边界目标”对话框中,添加输入信号u下在以下位置测量稳定裕度.同时,输入增益和相位值5和40预期的利润对话框的一部分。点击好吧以节省输入稳定裕度为目标。
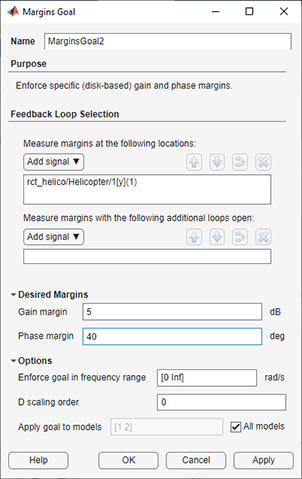
为产量稳定边际创造另一个边际目标。指定输出信号y和目标裕量,如图所示,并保存输出稳定裕量目标。
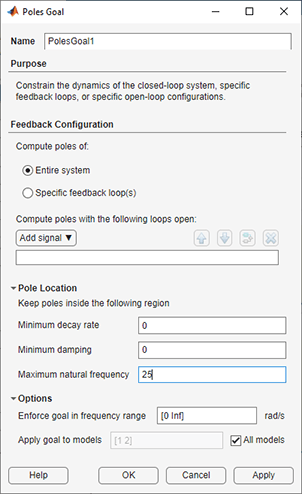
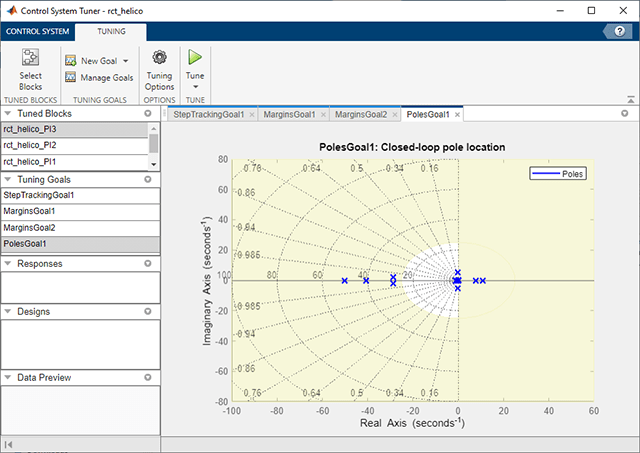
最后一个要求是限制快速动态和瞬变。为了实现这一点,创建一个调谐目标,将闭环极点的幅度限制在小于25 rad/s。在新目标下拉列表中,选择闭环动力学约束.在波兰人的目标对话框中,指定最大固有频率为25,然后单击好吧保存调优目标。
在创建每个优化目标时,Control System Tuner将创建一个新图形,其中显示优化目标的图形表示形式。当您对控制系统进行调优时,您可以参考此图,以了解调优后的系统满足调优目标的程度。
调整控制系统
调整控制系统以满足您指定的设计要求。
在调优选项卡上,单击调优.控制系统调谐器调整可调谐参数的值,以最好地满足这些要求。
控制系统调优器自动更新调优目标图,以反映调优的参数值。检查这些地块,看看设计满足了多少要求。例如,检查跟踪需求的调优步骤响应。
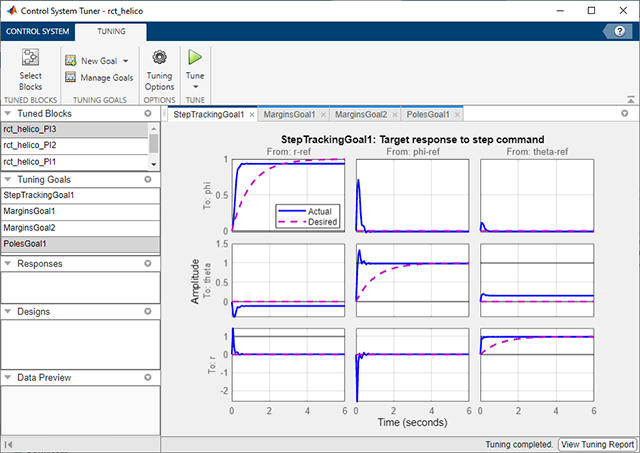
蓝色的线表示调整后的反应非常接近目标反应,用粉红色表示。上升时间约为2秒,没有超调,也没有交叉耦合。
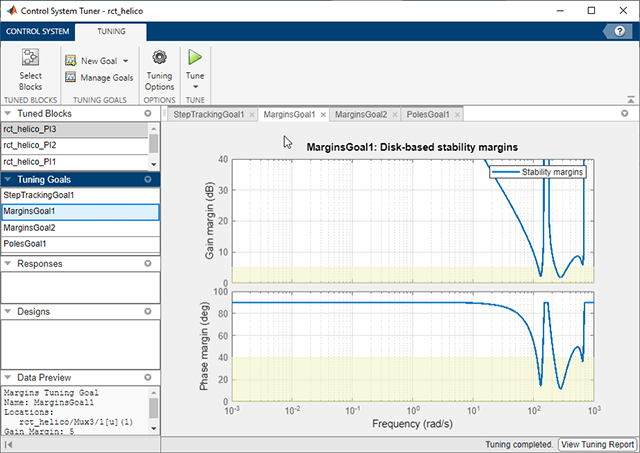
类似地,MarginsGoal1和MarginsGoal2图提供了多变量稳定裕度的可视化评估。(见diskmargin有关多变量稳定性边距的更多信息的参考页。)这些图表明,稳定裕度在阴影区域外,满足所有频率的要求。
您还可以查看调优结果的数字报告。单击优化报告在控制系统调谐器右下角。
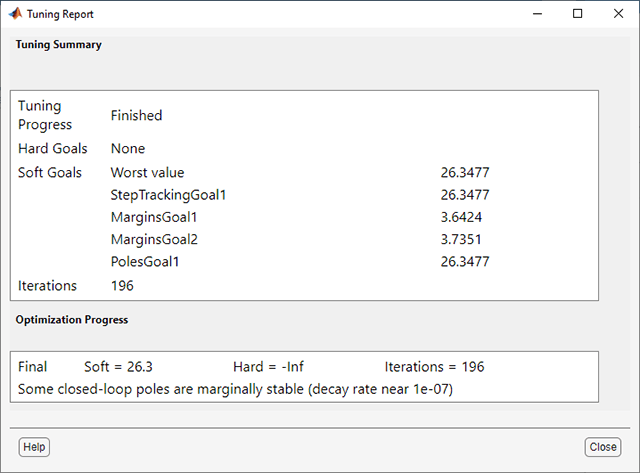
当您对模型进行调优时,Control System Tuner将每个调优目标转换为系统的可调参数的函数,并调整参数以使这些函数的值最小化。对于本例,调优报告显示所有调优目标的最终值接近1,这表明所有需求几乎都得到了满足。
验证优化设计
一般来说,您的Simulink模型金宝app表示一个非线性系统。Control System Tuner在应用程序中指定的操作点将模型线性化,并使用系统的线性近似来调整参数。因此,在完整的Simulink模型上验证控制器设计是很重要的。金宝app
为此,将调优后的参数值写回Simulink模型。金宝app在控制系统选项卡上,单击更新模块.在Simuli金宝appnk模型窗口中,用新的参数值模拟模型。观察setpoint命令中对步骤更改的响应,theta-ref,phi-ref,r-ref分别在0、3和6秒。
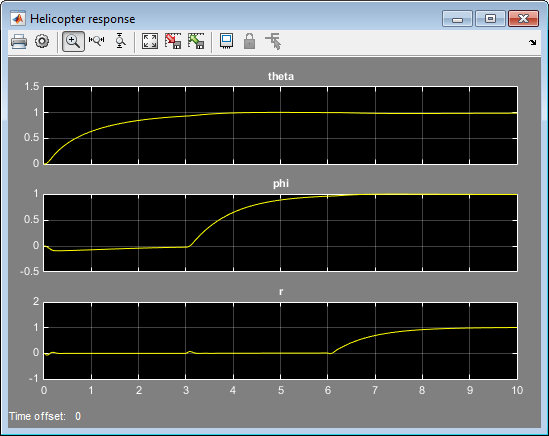
检查仿真以确认您在Simulink模型中获得了所需的响应。金宝app在这里,每个响应的上升时间约为2秒,没有超调,没有稳态误差,交叉耦合最小,符合设计要求。
另请参阅
相关的话题
你也可以从以下列表中选择一个网站:
