平衡
基于平方根法的平衡模型截断
语法
GRED=balancmr(G)GRED=balancmr(G,订单)[GRED,redinfo]=balancmr(G,key1,value1,…[GRED,redinfo]=balancmr(G,订单,key1,value1,…)
描述
平衡返回降阶模型格雷德的G和一个结构数组redinfo包含简化模型的误差界和原系统的Hankel奇异值。
错误界限是根据的汉克尔奇异值G.对于一个稳定的系统,这些值表示系统各自的状态能量。因此,通过检验系统汉克尔奇异值,可以直接确定系统的降阶。σι.
只有一个输入参数G,该函数将显示原始模型的Hankel奇异值图,并提示减少模型订单号。
方法的无穷范数上保证有一个错误界添加剂错误∥格雷德∥ ∞ 关于条件良好的模型约化问题[1]:
此表描述了的输入参数平衡.
论点 |
描述 |
|---|---|
G |
LTI模型需要简化。在没有其他输入的情况下, |
顺序 |
(可选)用于简化模型的所需顺序的整数,或可选的包含批处理运行所需顺序的向量 |
通过指定,可以生成一系列不同的简化订单模型的批处理运行顺序=x:y,或正整数向量。默认情况下,系统的所有反稳定部分都保留,因为从控制稳定性的角度来看,消除不稳定状态对系统建模是危险的。
“MaxError”是否可以以相同的方式指定'顺序'.在这种情况下,当Hankel奇异值的尾部之和达到“MaxError”.
该表列出了输入参数“关键”及其“价值”.
论点 |
价值 |
描述 |
|---|---|---|
|
不同误差的实数或向量 |
减少实现H∞错误。当礼物, |
|
|
可选的1 × 2单元数组的LTI权重
您可以使用加权函数使模型简化算法聚焦于感兴趣的频带。看到的: 作为替代,您可以使用 默认权重都是相同的。 |
|
|
显示汉克尔奇异图(默认) |
|
整数、向量或单元格数组 |
简化模型的顺序。仅当没有指定作为第二个参数时使用。 |
此表描述了输出参数。
论点 |
描述 |
|---|---|
格雷德 |
LTI降阶模型。当输入是一系列不同模型的阶数数组时,变为多维数组 |
雷迪福 |
一个包含三个字段的STRUCT数组:
|
G可以是稳定的或不稳定的,连续的或离散的。
例子
简化模型的排序
如果您没有为简化模型指定任何目标订单,平衡显示模型的Hankel奇异值,并提示您选择简化的模型顺序。
对于本例,使用随机30阶状态空间模型。
rng(1234,“旋风”);%固定随机种子,例如重复性G=rss(30,5,4);G1=balancmr(G)
请输入您想要的顺序:(>=0)
检查汉克尔奇异值图。

图中显示系统的大部分能量可以用20阶近似捕获。在命令窗口中输入“20”。平衡返回G1.
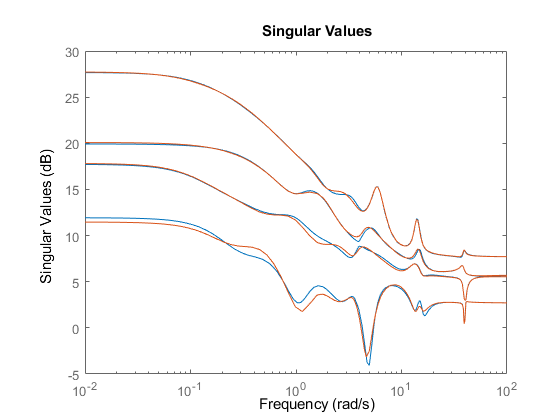
检查原始模型和简化模型的响应。
σ(G, G1)

20阶近似与原始30阶模型的动力学相当吻合。
模型简化为指定顺序
当您考虑特定的目标订单时,可以使用balancmr将高阶模型简化为这些订单。例如,使用随机30阶状态空间模型。
rng(1234,“旋风”);%固定随机种子,例如重复性G=rss(30,5,4);
使用标量输入参数将模型简化为单阶。例如,计算20阶近似值。
[G1, info1] = balancmr (20 G);σ(G, G1)
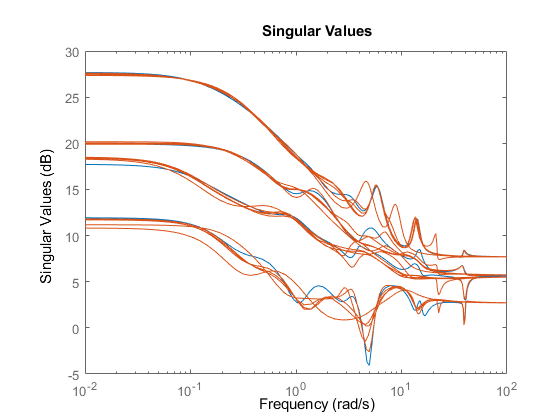
使用向量生成多个近似值。下面的命令返回从10到18的偶数阶模型数组。
[G2,info2]=balancmr(G[10:2:18]);sigma(G,G2)
模型简化到指定的最大误差
获得最低阶近似值,使截断状态的Hankel奇异值之和不超过指定值。对于本例,使用随机30阶状态空间模型。
rng(1234,“旋风”);%固定随机种子,例如重复性G=rss(30,5,4);
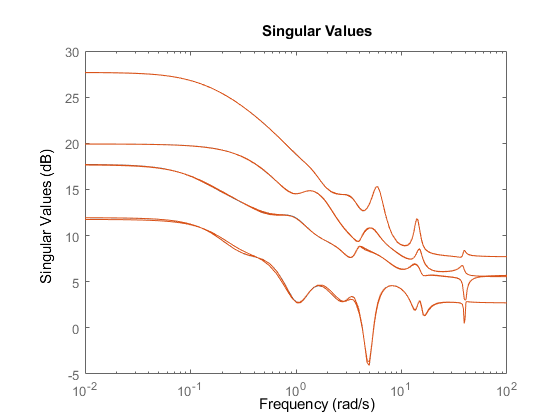
计算两个近似模型,其中一个误差不超过0.1,另一个误差不超过0.5。为此,请在数组中提供这些值。平衡返回一个近似模型数组。
Gr = balancmr (G,“MaxError”,[0.1 0.5]);尺寸(Gr)
2x1状态空间模型数组。每个模型有5个输出,4个输入,24到26个状态。
检查结果。
西格玛(G,Gr)
专注于特定频带的缩减
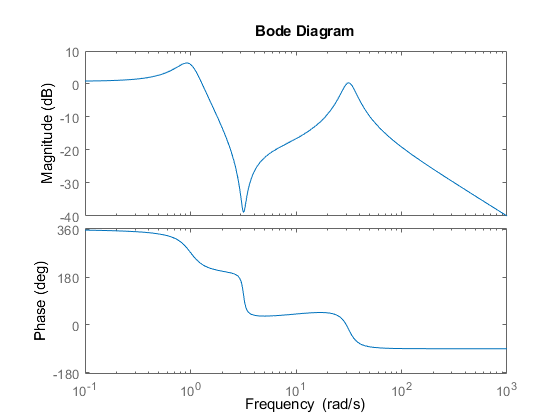
将四阶系统简化为二阶近似,并强调频段为10 rad/s - 100 rad/s。考虑以下系统。
sys =特遣部队([1 0.5 - 1])+特遣部队(100 * 1/10 [1],[1 1000]);波德(系统)
要将模型简化算法重点放在高频动力学上,请指定一个具有带通剖面的函数。
s=tf(“年代”);w1 = (s + 1) / (s / 10 + 1) / (s / 60 + 1) * (s / 600 + 1);bodemag (w1)
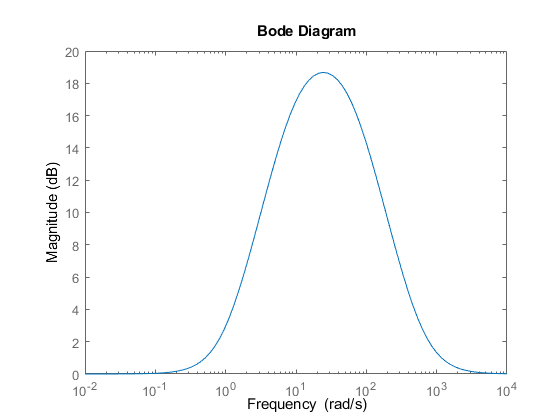
该图证实了加权函数w1具有所需的轮廓,峰值在10 rad/s和100 rad/s之间。要执行缩减,请使用“重量”选择平衡.
权重={1/w1,1};wrsys=平衡mr(sys,2,“重量”、重量);
将结果与未加权的二阶模型进行比较。
rsys = balancmr (sys, 2);波德(sys、rsys wrsys)传说(“原件”,“未加权”,“加权”)
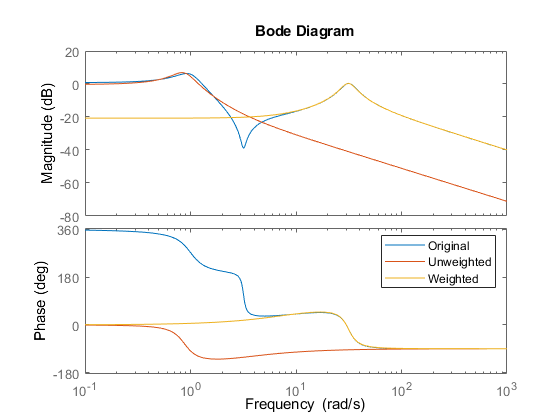
使用加权函数得到的模型在10 rad/s-100 rad/s频带内提供了更好的动力学匹配。
基于频率相关误差轮廓的模型约简
利用加权函数控制原始模型和简化模型之间误差的频率依赖性。
对于本例,加载一个48状态的SISO模型,并将其减少到6阶。
装载(“balancmrData.mat”,“bplant”)bplant6=平衡mr(bplant,6);bode(bplant、bplant6、bplant-bplant6、日志空间(0,2200))图例(“原件”,“减少”,“错误”)
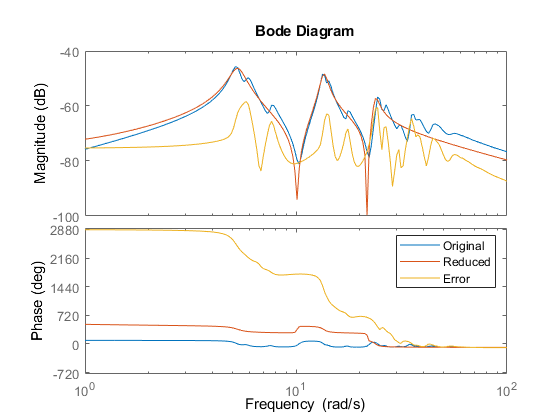
误差在频率上是均匀分布的。创建一个权重函数,允许在低于100 rad/s的频率下产生较大的误差。在这种情况下,使用双固有函数,在低频有单位增益,但在较高的频率下降到-40 dB。
W = tf(0.01*[1 1.4e2 1e4],[1 14 100]);bplant bodemag (W)

使用此加权函数,再次将模型降为6阶。因为植物是一个SISO模型,您可以使用该函数作为输入或输出权重。
bplant6W = balancmr (bplant 6“重量”,W,1});bode(bplant,bplant6W,bplant-bplant6W,logspace(0,2200))图例(“原件”,“降低w /重量”,“错误”)
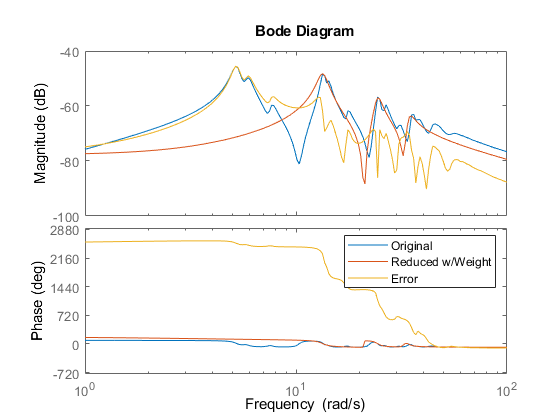
现在,低频时的误差更大,原始模型和简化模型在高频时的匹配也相应更好。
算法
给定状态空间(A、 B、C、D)的系统和k,所需的降阶,以下步骤将产生一个相似变换,将原始状态空间系统截断为kth降阶模型。
求能控能观文法的奇异值分解
P = UpΣpVpT
Q = U问Σ问V问T
求文法数的平方根(左/右特征向量)
lp= UpΣp½
lo= U问Σ问½
查找的SVD(loTlp)
loTlp= UΣVT
然后左右变换为最终结果kth降阶模型为
年代五十、 大的L =oU(:,1:k) Σ(1;k,1:k) )–½
年代R,大L =pV(:,1:k) Σ(1;k,1:k) )–½
最后,
平方根平衡截断算法的证明见[2].
工具书类
[1] Glover,K.,“线性多变量系统的所有最优Hankel范数逼近及其Lµ误差界”,《国际控制杂志》,第39卷,第6期,1984年,第1145-1193页
[2] Safonov,M.G.和R.Y.Chiang,“平衡模型简化的Schur方法,”IEEE反式。自动售货机。来讲。,第34卷,第7期,1989年7月,第729-733页
你也可以从以下列表中选择一个网站: