主要内容
pcsegdist
基于欧几里得距离将点云分割成簇
语法
描述
标签= pcsegdist (ptCloud,minDistance)minDistance不同簇的点之间。pcsegdist为点云中的每个点分配一个整数集群标签,并返回标签所有的点。
[也返回集群的数量。标签,numClusters) = pcsegdist (ptCloud,minDistance)
[___) = pcsegdist (___,使用名称-值参数设置属性。例如,名称=值)标签= pcsegdist (设置每个集群中的最小和最大点数为ptCloud,minDistanceNumClusterPoints =[1,正])(1正).
例子
基于欧氏距离的聚类点云
创建两个同心球体并将它们结合起来。
[X, Y, Z] =球(100);loc1 = [X (:), Y(,)、Z (:));loc2 = 2 * loc1;ptCloud = pointCloud ([loc1; loc2]);pcshow (ptCloud)标题(“点云”)
设置集群之间的最小欧氏距离。
minDistance = 0.5;
分割点云。
[标签,numClusters] = pcsegdist (ptCloud minDistance);
绘制标记的结果。这些点被分成两组。
pcshow (ptCloud.Location、标签)colormap (hsv (numClusters))标题(“点云集群”)
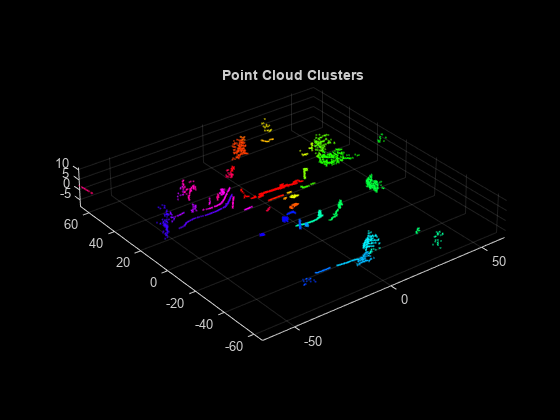
基于欧几里得距离的聚类激光雷达点云
在工作区中加载一个有组织的激光雷达点云。
ld =负载(“drivingLidarPoints.mat”);
检测接地面。距离的单位是米。
maxDistance = 0.9;referenceVector = [0 0 1];[~,内围层,离群值]= pcfitplane (ld.ptCloud, maxDistance referenceVector);
拆除接地点。
ptCloudWithoutGround =选择(ld.ptCloud、异常值);
对点云进行聚类,每个聚类至少有10个点。
minDistance = 2;minPoints = 10;[标签,numClusters] = pcsegdist (ptCloudWithoutGround minDistance,“NumClusterPoints”, minPoints);
删除标号值为的点0.
idxValidPoints =找到(标签);labelColorIndex =标签(idxValidPoints);segmentedPtCloud =选择(ptCloudWithoutGround idxValidPoints);
绘制标记的结果。
figure colormap(hsv(numClusters)) pcshow(segmenttedptcloud . location,labelColorIndex) title(“点云集群”)
输入参数
输出参数
扩展功能
介绍了R2018a
你也可以从以下列表中选择一个网站:
