pcfitplane
平面与三维点云拟合
语法
描述
模型= pcfitplane (ptCloudIn,maxDistance)
该函数使用m估计样本一致性(MSAC)算法来寻找平面。MSAC算法是RANdom SAmple Consensus (RANSAC)算法的一种变体。
模型= pcfitplane (ptCloudIn,maxDistance,referenceVector)referenceVector输入。
模型= pcfitplane (ptCloudIn,maxDistance,referenceVector,maxAngularDistance)
[另外,返回点云输入中的内嵌点和离群点的线性索引。模型,inlierIndices,outlierIndices) = pcfitplane (ptCloudIn,maxDistance)
[___,另外,使用前面的任何语法返回inlier点到模型的距离的平均误差。meanError) = pcfitplane (ptCloudIn,maxDistance)
[___) = pcfitplane (使用一个或多个指定的附加选项ptCloudIn,maxDistance,名称,值)名称,值对参数。
例子
从点云检测多个平面
加载点云。
负载(“object3d.mat”)
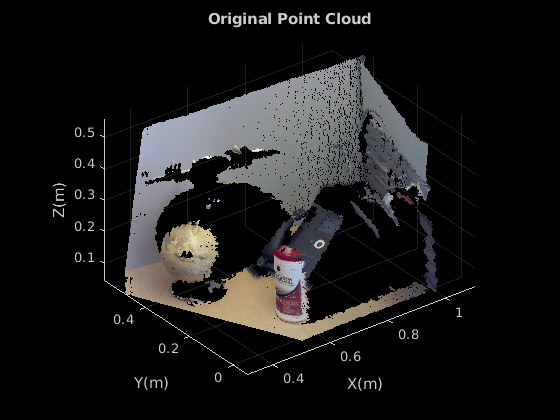
显示和标记点云。
图pcshow (ptCloud)包含(“X (m)”) ylabel (“Y (m)”) zlabel (“Z (m)”)标题(原始点云的)
设置平面拟合的最大点到平面的距离(2cm)。
maxDistance = 0.02;
设平面的法向量。
referenceVector = [0, 0, 1];
设置最大角度距离为5度。
maxAngularDistance = 5;
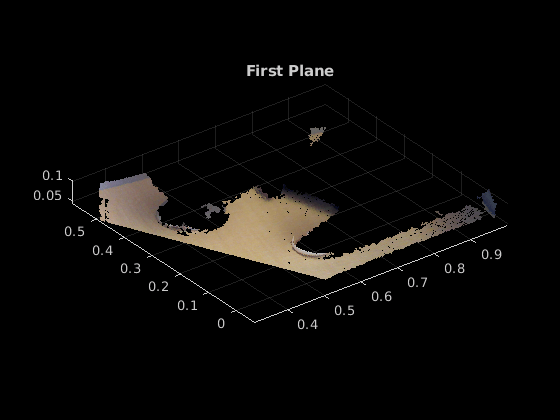
检测第一个平面,即表,并从点云中提取它。
[model1, inlierIndices outlierIndices] = pcfitplane (ptCloud,...maxDistance、referenceVector maxAngularDistance);plane1 =选择(ptCloud inlierIndices);remainPtCloud =选择(ptCloud outlierIndices);
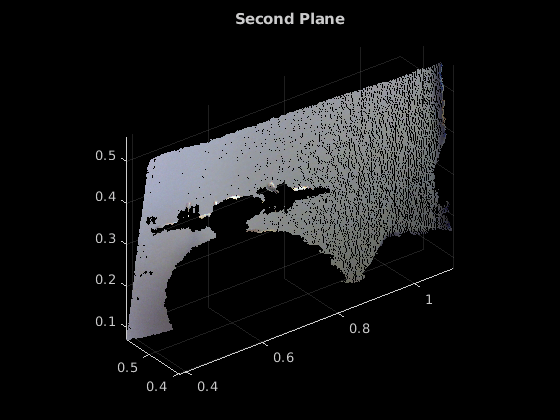
设置感兴趣的区域限制搜索第二个平面,左墙。
roi =[正无穷,0.4,正,负,正);sampleIndices = findPointsInROI (remainPtCloud roi);
检测左壁并从剩余的点云中提取。
[model2, inlierIndices outlierIndices] = pcfitplane (remainPtCloud,...maxDistance,“SampleIndices”, sampleIndices);plane2 =选择(remainPtCloud inlierIndices);remainPtCloud =选择(remainPtCloud outlierIndices);
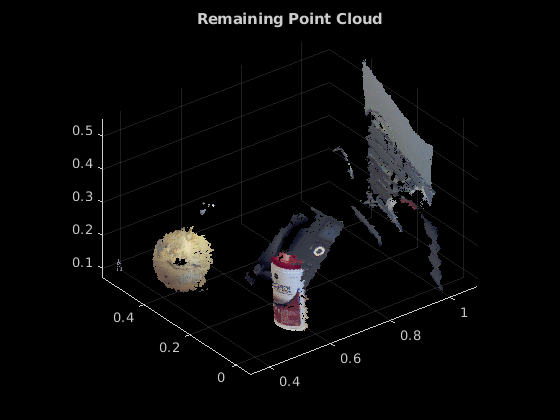
画出两个平面和其余的点。
图pcshow (plane1)标题(第一架飞机的)
图pcshow (plane2)标题(第二架飞机的)
图pcshow (remainPtCloud)标题(“剩下的点云”)
输入参数
输出参数
参考文献
Torr, P. H. S.和A. Zisserman。“MLESAC:一种新的用于估计图像几何的鲁棒估计器”。计算机视觉与图像理解.2000.
扩展功能
另请参阅
pointCloud|pcplayer|pcshow|pcwrite|pcread|pcfitsphere|pcfitcylinder|planeModel|pcmerge|pctransform|pcregistericp|pcdenoise|affine3d
主题
你也可以从以下列表中选择一个网站:
